


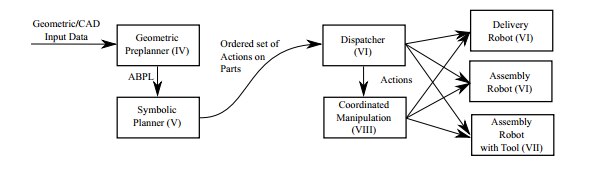
System concept block-diagram (via MIT)
If robots will ever serve humans--or take over the world--they are going to have to be able to build their own tools and furniture... like a table. A duo of bots coordinated by software developed by Ross Knepper, Todd Layton, John Romanishin and Daniela Rus at MIT’s Distributed Robotics Lab, is already getting started on achieving the ability to put the simplest of Ikea furniture together.
Knepper and his team have devised a system that turns two non-specialized Kuka YouBots into a well coordinated team that collaborate to build a LACK coffee table. This table design is easy to assemble, as it only needs the legs to be screwed on. However, one robot could not do it alone. So, while one of them sets the screw into one of the empty holes, the other positions itself around the leg to begin rotating it. Flipping the table over also needs precise work in concert. One of the robots has a specially designed arm attachment to allow it to screw in the leg, but the regular factory-installed gripper arm can be retrieved by the bot from a dock when it is time to use it.
The building instructions are synthesized from CAD drawings of the table’s parts. The CAD drawing is currently done by hand, as the robots are not visually enabled. In the future, the drawings could be obtained using a robot’s RGB+D data.
Geometric reasoning software is used to determine where the holes are and where pieces attach. This stage also looks at how parts must align, takes into account symmetrical interchangeable parts and makes sure that there are no collisions between the bots or parts. This creates a blueprint but does not provide directions or a plan to follow.
Soft-gripper in use (via MIT)
To first construct the building plan, the robot system uses custom, object-oriented symbolic planning language that is generated from the CAD-derived blueprint and turned into text. This text then compiles to ABPL, A Better Planning Language, similar to PDDL, or Planning Domain Definition Language, which allows the user to provide problem data in a conventional-object oriented format and bots to use existing solutions to planning problems in the field of artificial intelligence. ABPL problem specification is one-fourth the size of PDDL, which allows for faster problem creation and thus execution.
So far, the building team can only handle building LACK coffee tables. The team wants to generalize the software so it can be adapted to different table designs. They will also keep working to develop more planning programs that can assemble other types of furniture.
This is the beginning to programs that could allow mobile manipulation robots to work together on factory floors and perhaps even in homes. This MIT robot duo still relies on humans to make sure all of the pieces are oriented in a predetermined way. A paper on their research is due to be presented at the International Conference on Robotics and Automation in Karlsruhe, Germany in May.
C
See more news at:
