


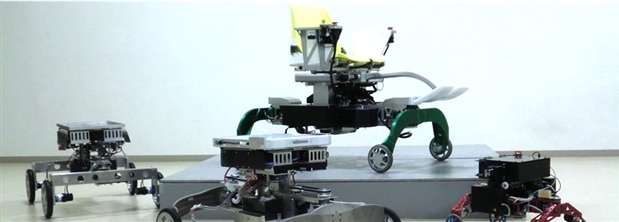
Prototypes (via Nakajia Lab)
Wheel chairs traverse the smooth pavement without a problem, but how about when there are small obstacles such as a curb or a few steps in the way? Researchers from Chiba Institute of Technology, led by Shuro Nakajima, have built a concept robotic wheelchair that is capable of traversing small amounts of steps and obstacles. Integrating sensors and some deft algorithms, all users need to do is simply push a joystick in the direction they wish to travel and the chair will handle the dirty work.
Utilizing four-wheel drive and five axes, the chair's wheels are capable of a variety of movements including leg like movements by the wheels. Additionally, sensors mounted on the bottom near the wheels assess and detect obstacles around the chair and can even calculate how big a step is. Through varying torque from the wheels, which can also substitute as sensors, and carefully calculated movements the chair handles curbs, holes, and gaps without a problem. Furthermore, the chair has been designed to keep the users in comfort. While traversing obstacles, the chair remains at a level state so no users will be sitting sideways or at an uncomfortable angle.
The chair is currently in its concept stage, and the creators have just begun to demonstrate it to the world. They plan to begin releasing prototypes to people for testing and feedback. The Japanese undoubtedly have a love for robotics, and it comes to no surprise they have integrated robotic legs into a wheel chair. Maybe they will take this design a little further and create small ride-able robots for recreational purposes.
Cabe
