



Given Imaging’s PillCam is outfitted with tiny cameras to visualize colon abnormalities. (Image credit Given Imaging)
“The doctor will see you now, and so will his robots,” ─ a phrase inching its way towards reality as medical institutions are developing micro-robots capable of doing everything from performing internal surgery to sophisticated imaging, providing the medical community with groundbreaking new tools for better care. Internal is the key word here, while some robots are used to perform surgeries from outside the body (such as Sheikh Zayed Institute’s STAR), these tiny machines function inside the human body for non-invasive care.
Given Imaging’s PillCam is a great example of non-invasive care performed by an internal robot, which is the size of a large pill and used for visualizing abnormalities (such as cancerous cells) inside the colon. The company has three versions of the PillCam, including the SB (for small intestine imaging), COLON (self-explanatory) and ESO (for imaging the esophagus) but all function primarily the same, just in different locations. Each PillCam is outfitted with micro cameras, tiny LED, battery, and transmitter.
As they move through their area of operation, they take a stream of images and transmit them to a receiver worn by the patient for the duration of its journey, about 8-hours. Once completed, it safely passes out of the body through the stool and is then discarded. What’s more, patients no longer need to be sedated as the procedures do away with typical endoscopy camera normally used for internal imaging. Tiny imaging robots are just the tip of the iceberg when it comes to tiny internal robots. Others can be utilized for removal of foreign objects that have been accidentally swallowed, such as MIT’s Ingestible Origami Robot-
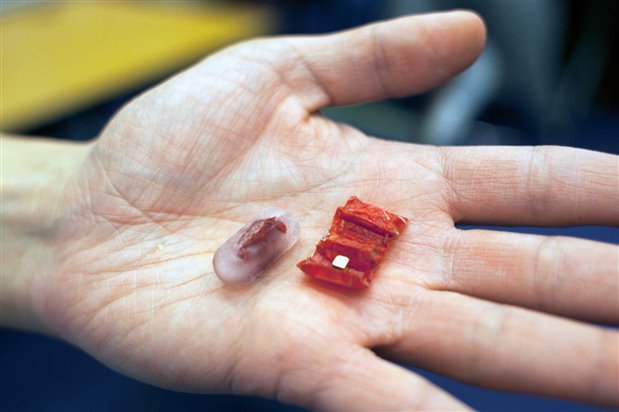
MIT’s Ingestible Origami Robot can be used to remove internal foreign objects and perhaps perform some surgery. (Image credit MIT)
The tiny origami robot is swallowed in pill form, travels through the body magnetically and unfolds itself, unveiling a tiny magnet within to attract any metallic body inside the stomach. It can also propel itself along the stomach wall using ‘slip-stick’ motion, meaning it uses its appendages to stick to the surface of the wall through friction when it moves. It slips free again when it unfolds or changes its weight distribution.
The robot itself was designed using two layers of structural material that sandwiches another material (in this case pig intestine) that shrinks when heated. The number and location of tiny slits on the external material determine how the material unfolds, thus unfolding in a pre-determined desired pattern. MIT’s Origami Robot was designed to trap and collect metallic ingested objects such as batteries, which apparently 3,500 people swallow every year in the US.
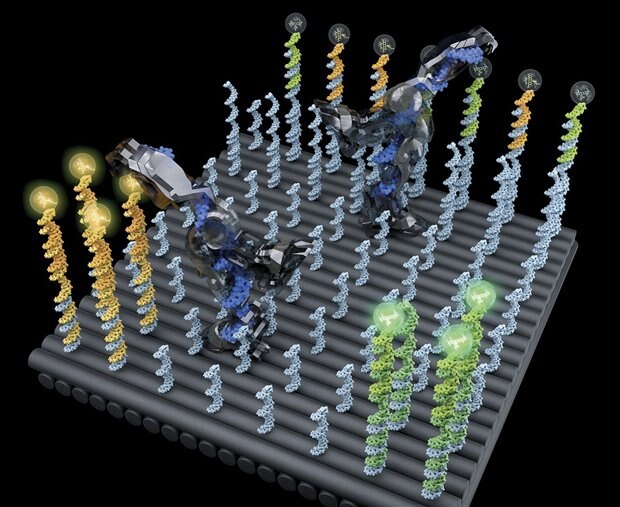
Caltech’s DNA Robots are capable of sorting and delivering molecular cargo. (Image credit Caltech)
While pill-sized robots are small enough for internal medical applications, others are small enough to interact with DNA, such as Caltech’s DNA Robots, which can sort and deliver molecular cargo, including delivering medicines to precise locations in the body. These nano-sized robots are made from a single DNA strand and can autonomously roam around, pick up desired molecules and drop them off at different locations.
Each DNA robot was designed with three basic building blocks- a leg outfitted with two feet for ‘walking,' and arm and hand for picking up molecules and a tiny brain of sorts to recognize locations as well as to signal the hand to release its cargo at the specified location. Each piece of the robot is made of a few nucleotides inside a single strand of DNA.
To demonstrate the robots’ ability, the researchers had them move about a 58 X 58-nanometer pegboard of which the pegs are constructed of single strands of DNA. Each foot of the robot could bind one at a time to the DNA-based pegs, leaving the other foot to free-float. When random molecular fluctuations were introduced, the floating foot would latch onto it, pulling the other foot until it releases from the original peg, thus giving the robots the ability to walk.
When the robots’ encountered a specific cargo molecule tethered to the board, they latched on with their hand and transported them around the board until they detected a delivery point and then released them. In all, it took the robots roughly 300 steps to complete their tasks and had an 80% success rate at identifying and delivering the cargo at an individual level; the rate goes up when more robots are introduced to perform the same function.
While the development of tiny micro-robots continue to advance as new technologies are introduced, don’t expect to see them in doctor’s medical bags anytime soon. This is primarily due in part to FDA approval, which can take months or even a decade or more depending on the application. The PillCam was approved back in 2004 after several years of development, so chances are these newly emerging micro-robotic platforms will encounter the same time constraints. Regardless, future medical applications will undoubtedly include robots on all scale sizes- from surgical arms to DNA manipulators and everything in between.
Have a story tip? Message me at: cabe(at)element14(dot)com