



Like a futuristic fossil, MIT's Cheetah bot seeks to replicate the real thing (via MIT)
Speed and power are not everything. A team at MIT’s Biomimetics Robotics Lab is showing that huge improvements in the function of a quadruped robot can be made by following nature’s biometrics in animals to achieve their efficiency. The robot, called the Cheetah Bot, employs a biomimetic architecture to run at 13.7 mph at efficiency much higher than bipedal robots and approaching the efficiency of real animals.
The project is being led by MIT Professor Sangbae Kim. He and his team have designed everything from the lightweight, high-strength bones of the robot to the electrical three-phase permanent magnet synchronous motors. They did this to achieve a better efficiency compared to similar robots like the Big Dog being prototyped by Boston Dynamics, which uses pneumatic motors. The MIT Cheetah is only half as fast as the Big Dog, but the innovation is its performance and efficient use of electricity.
Two coaxial motors with single planetary gears are located at the shoulder joint and at the hip joint of the cheetah. These use regenerative drive, similar to regenerative braking, so that energy is conserved with every stride. A differential actuated spine activates cyclically with the motion of the legs and acts to further improve the efficiency of the bots movement upon impact and upon hind leg propulsion. These custom motors were made from off-the-shelf Emoteq HT-5001 motors. The team converged on using a 5.8:1 gear ratio for their planetary gear. These efforts have managed to double the torque density of the commercial motors they were using at first.
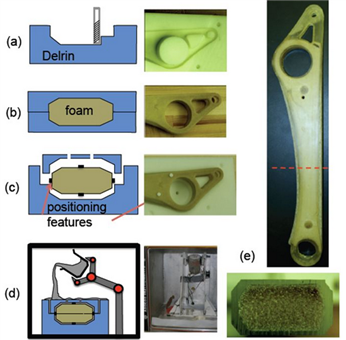
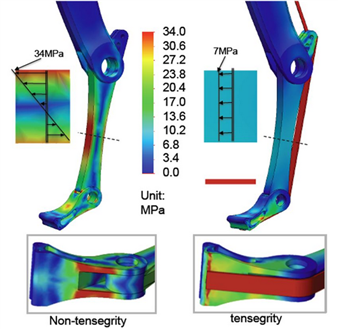
(Left) Leg concept and production part. (Right) Tensegrity analysis. (via MIT)
The Cheetah Bot’s composite frame is made out polyurethane filled with foam “bone marrow.” This structure is then covered with resin that makes the “bones” low-mass and high-strength. Kevlar tendons representing the Achilles tendon and the gastrocnemius muscles carry tension and replicate the tensegrity of the bones in the foot and leg of a real cheetah. This replica structure reduces the stress in the robot’s joints by 60%, which further improves the mechanism’s overall efficiency.
These design solutions mean that MIT’s cheetah has a cost of transport (COT) ratio of 0.52. The COT factor is determined by multiplying a mechanism’s power consumption by the corresponding velocity then dividing by its total weight. The 0.52 COT is very impressive compared to Honda’s Asimo that has a COT of 2, and Boston Dynamics’ Big Dog that has a very inefficient COT of 15.
This high efficiency means that the cheetah can be tested while carrying 6.6 lbs of dummy weights that represent the four 22.2V lithium polymer batteries it will one day carry. The cheetah’s impressive COT means that it requires 1 Watt when running at the max 13.7 mph. When batteries are put to use, the bot will be able to run at 5.2 mph for 1.23 hours, a total distance of 6.2 mi. With further work, the team wants to achieve a COT of 0.33, which is “between the efficiencies of runners and flyers in nature”.
MIT’s bot, like the Big Dog, still need supports to keep it running on a treadmill. The team has published a paper titled “Design Principles for Highly Efficient Quadrupeds and Implementation on the MIT Cheetah Robot.” The team’s findings were announced at this year’s IEEE International Conference on Robotics and Automation. The work is being funded by DARPA’s Maximum Mobility and Manipulation (M3) program.
C
See more news at: