



Another robotic mimic of nature's mechanics. (via MIT)
A team of researchers from the Massachusetts Institute of Technology and the University of Maryland recently unveiled a robotic, low-energy digging anchor, called RoboClam, that may offer an alternative to contemporary digging devices.
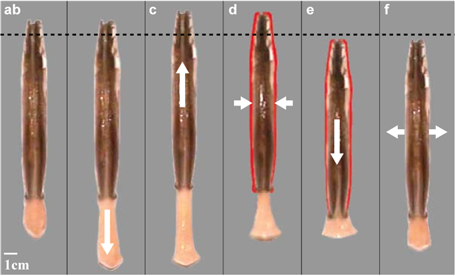
The device was inspired by the Atlantic razor clam, a narrow-shelled clam that looks like a closed straight razor and is known for its digging abilities. In fact, the Atlantic razor clam is one of the world’s best diggers.
The Atlantic razor clam can dig about one centimeter per second, according to Amos Winter, a researcher involved in the study. The clam can also dig up to 70 centimeters and after trapping itself more than two feet below the ocean floor, the resilient clam can dig itself out. Winter said the clam is 10 times more efficient that all man-made digging devices currently out on the market, including the best anchors, prompting researchers to figure out why.
The research team discovered that the razor-like clam burrows beneath the ocean floor through a process called fluidizing, which breaks up the solid sandy floor, allowing the clam to burrow beneath it. The clam contracts its body in a way that creates a fluid vacuum, destabilizing the hardened sand and turning it back into granules for a short period of time. The research team intended to create a machine that could copy the clam’s digging strategy and potentially replace the chunky outdated anchors still used today.
The team developed the RoboClam. The machine is about the size of two sticks of gum, but can model the fluidizing behavior of the razor clam. It doesn’t just dig, either. The device can also resurface, or unset, like the real-life razor clam – a feature of which no contemporary anchors are capable today, potentially making it more viable than any anchor on the market. Researchers perfected the basic prototype and unveiled it at an American Physical Society meeting in Denver last fall and are currently working on RoboClam 2.
Bluefin Robotics supported the research and the final design is expected to be able to serve as an effective, low-energy anchor for unmanned environmental submarines and underwater fiber-optic cables.
Some robotic submarines are regularly relocated to observe changes in water currents and temperature. The research team believes RoboClam may be useful for these types of devices, as it can burrow itself at a desired location, unset, relocate and re-burrow itself at the next location. The team is also hopeful that the hand-held device can be used for detonating detected underwater mines and may eventually be used for bigger projects, such as oil drilling sites.
C
See more news at: