


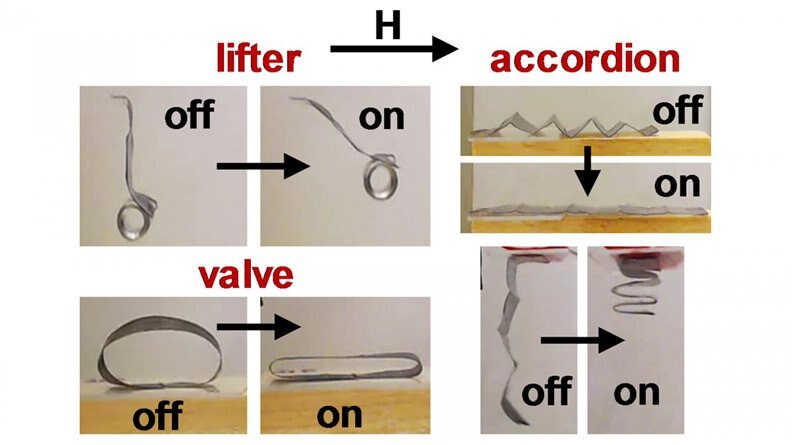
A group of researchers discovered how to use magnetic fields to help control and steer soft robots. Researchers created these three robots using the new technique (Image via North Carolina State University)
Soft robots, often made with deformable materials like silicone, plastic, and rubber, do things that most robots can’t. Because they are flexible and can actively interact with the environment, it makes them ideal for certain situations, like protecting your heart. But they do come with their share of setbacks, like their simple movements. This limits how much they are controlled, but this may soon change. A team of researchers from North Carolina State University recently invented a technique that allows the soft robots to make complex moves while retaining simple designs. It’s all done with a magnetic field.
According to Joseph Tracy, the study’s co-author, the idea to use magnets came about from the team’s previous work with magnetic nanoparticles. Using magnetic fields, they were able to align nanoparticles within a polymer placing them in a highly ordered structured once the polymer turned solid. They decided to use the approach when thinking about soft robots.
To get it working, the soft robots are covered with a liquid polymer mixture containing iron micro particles that form chains using a magnetic field. Once the mixture dried off, it left behind an elastic polymer film equipped with the magnetic particles. This allowed the researchers to remotely steer robots in different directions depending on the strength and direction of the magnetic field.
The technique proved to be a success, so much so that the team built three soft robots performing different functions. One is a cantilever that lifts up to 50 times its own weight. The second bot is shaped like an accordion that expands and contracts, similar to how a muscle moves. The last bot is a tube that squeezes itself like a pump. The results are promising, but the method isn’t quite ready for the masses just yet.
The team’s next step is to improve the power and control of the devices to “advance the potential of soft robotics.” For now, they’re keeping track of the performance the bots, like the cantilever, with a metric they developed. The one they’re currently using keeps track of how much the cantilever can lift and the strength of the magnetic field.
So it’ll be a while before this method can be applied to real robots. Not only are there more kinks to work out, you still need an external device to make the field, something researchers need to figure out how to get around. Still, the results show many potential uses. Because of how the accordion and pump robots function, they would be ideal to mimic organ functions. They could also help out with prosthetics, implants, and other devices in the healthcare field.
Have a story tip? Message me at: cabe(at)element14(dot)com