


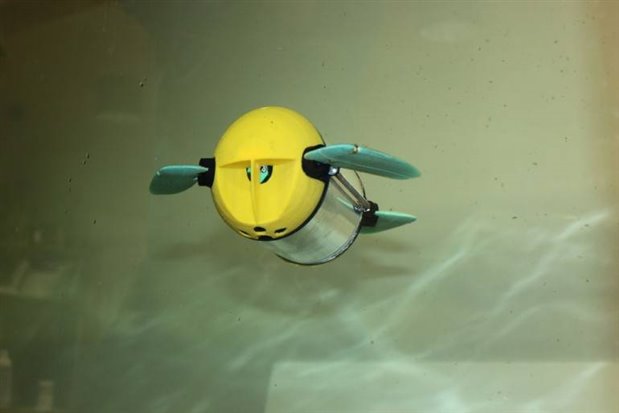
Tallinn University of Technology’s U-CAT robotic sea turtle in action (via Tallinn)
Scientists and archeologists have been using submersible ROVs for decades to explore the oceans depths and those hard to reach shipwrecks. The problem with crafts/subs is that they are often too big and bulky to navigate inside those wrecks, which limits what we can learn from them. Another issue is the propulsion systems, which the ROVs use to navigate. Typically, they rely on thrusters for precise movement, however that method is not ideal when it comes to enclosed spaces. To overcome those limitations, scientists from the Tallinn University of Technology (Estonia) have created an incredibly maneuverable robotic sea turtle, designed to explore shipwrecks. The turtle, known as U-CAT, is part of the European Union’s ARROWS project, whose aim is to develop low-cost autonomous underwater vehicles for archeological operations. The robot itself, mimics the way sea turtles move underwater with four independently driven flippers, which allows the robot to move forward, upward, up, down and even turn on a dime. The locomotive aspect alone makes the U-CAT an ideal choice when navigating confined enclosures and limits the amount of silt that can decrease visibility. The U-CAT houses an onboard camera that continuously feeds video to scientists working topside, which allows them to inspect almost every aspect of a sunken ship’s holdings. Since the robot is autonomous, it requires no tether, which can become snagged or tangled, potentially destroying not only the sunken wreckage but also the ROV itself. The scientists from TUT plan on testing the U-CAT at archeological sites in both the Mediterranean Sea and the Baltic Sea and will eventually work in tandem with other larger ROVs outfitted with imaging technology to discover, identify and ultimately reconstruct (through software) those particular sites.
C
See more news at:

