


Soft gripping robot. Artificial muscle research from soft robotics and elect-adhesion research have been combined into a new robot hand that can pick up any object without previous training. Researchers at École polytechnique fédérale de Lausanne (EPFL) see exciting applications for this technology in manufacturing, aerospace, and prosthetics. (via EPFL)
Robotics have taken a leap forward with the creation of a new soft robot that uses electro-adhesion to pick up any object without a hitch created by researchers at École polytechnique fédérale de Lausanne (EPFL). These grippy robot hands can have an immediate application within manufacturing and aerospace, with future applications in prosthetics and AI robots. The possibilities are pretty endless since the practical use of any robot can be extended if it can grip, lift, and hold a variety of objects with ease. Previously, robotics has focused on using specific attachments to hold specific objects and the robot usually had to be taught how to handle a specific object as well to accommodate for shape, size, and weight. The mixture of electro-adhesion and soft robotics eliminates the need to train the robot to accommodate for the shape or size of the object.
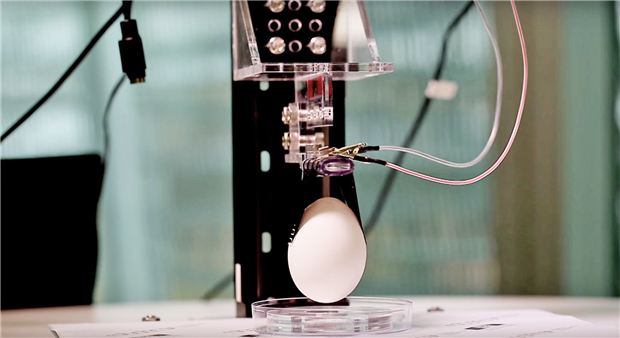
Electro-adhesion is the equivalent of static electricity that keeps a balloon stuck to your pant leg, or to the wall. The tip of the soft robot fingers utilizes static electricity to generate a strong hold on the object, in the same way that we use our thumbs to grip objects. The use of electro-adhesion allows the grippers to hold up to 100 times their own weight. This is pretty impressive considering their soft 'robot hand' currently consists of two, lightweight, flimsy flaps of silicone.
The flaps, or 'robot fingers' have 5 layers. The middle layer consists of a stretched elastomer which has two layers of electrodes and two layers of silicone of different thickness surrounding it. The result is a stretchy, flexible, soft flap that can conform to any shape. In the 'off' position, the flaps are open and curved upward to get close enough to the object. Once electricity is coursing through the electrodes in the flaps, electrostatic force causes the flaps to bend towards the object – imitating muscle flexion. The electrostatic energy causes electro-adhesion which creates a strong robot grip, allowing the hand to lift and move the object.
It's a pretty simple and elegant design that takes advantage of previous research within soft robotics, specifically artificial muscles, and elect-adhesion. However, this is the first time they have been mixed together to create a robot that can grip objects. This project was funded by NCCR Robotics and they have recently published their findings in Advanced Materials.
The applications of this robot are currently being considered for inclusion in the food manufacturing industry and the researchers posit that it could also be used to pick up space dust and particles. There are also potential applications in prosthetics that would enable users to pick up household objects much easier. Finally, I think this type of technology could make a very convincing feeling robotic hand in the future for AI robots and future robot butlers – or at least I hope so.
Have a story tip? Message me at:
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

Catwell
in reply to DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

Catwell
in reply to DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children