


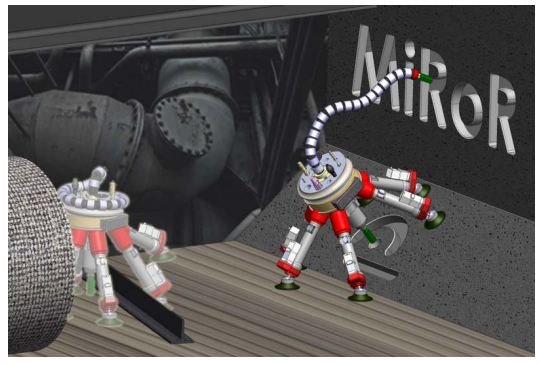
Mini-RoboMach concept in a "hybrid configuratin," with "free-hex" and "snake-arm." (via Mechatronics)
The automation of machining tools ranges in application from something as simple as remotely drilling a hole to a more complex task of assembling machinery equipment. With the development of autonomous robots, the unification of these two technologies is a favorable move. People are often put into harm’s way when hazardous environments such as nuclear power plants go under maintenance. Now, a European consortium is working on a project that may revolutionize the way on-site repair is done in these types of environments.
The MiRoR project aims to develop a Miniaturized Robotic Machine (Mini-RoboMach) that will perform “holistic in-situ” repair to various installations and industrial complexes in otherwise hard to reach areas. Industries such as energy plants and oil drilling stations will benefit from such a system by keeping their valiant workers out of danger. The consortium is already backed by the support of the University of Nottingham, Rolls Royce, The Swiss Federal Institute of Technology, AREVA, Acciona Infrastructure, and Petrom - giving the project access to patented technology and a head start on industrial application partners.

Prototype Mini-RoboMach (via Mechatronics)
The CNC robot makes use of the novel “free-leg hexapod” system, arming it with a six-legged base for performing precision machining processes while on the move. A stiffness-controlled flexible robot arm also gives the system the ability to “snake” and work on a variety of maintenance tasks. Additionally, the Mini-RoboMach integrates a three-level system hierarchy to control its functions. The low-level directs the machining processes, while the intermediate-level governs the system’s movements. The high-level functions are related to the intelligent controls, which give the robot navigation guidelines in addition to inspecting and analyzing its surrounding environment for optimal leg positioning and machine calibration prior to performing the required task.
Once the autonomous CNC machine is developed, further work will be done to evaluate its performance. A virtual workbench will be created to pre-assess the robot’s hardware and software prior to demonstrating its usefulness on large, intricate industrial environments.
Cabe
