



Sepios concept (via Sepios official)
While some roboticists are focusing on the development of Artificial Intelligence, others are using their resources to enhance our knowledge of aquatic life. Students from the Swiss Federal Institute of Technology (ETH) in Zurich, for example, are doing just that. The student team recently developed one of the most easily maneuverable fish robots in the world, called Sepios.

Sepios Rollout Team (via Sepios)
The nautical robot is a data-capturing machine based on the cuttlefish. It sits at 70cm long and 95cm wide, including wingspan, and weighs 22.7kg. The body of the machine houses some serious tech, including a National Instruments myRIO, connection board, swim bladder, pressure gauge, humidity sensor, accelerator, gyroscope, magnetometer, distance-detecting laser, LED lighting and live feed camera. This allows the robotic fish to be able to detect and avoid obstacles, while recording marine life.
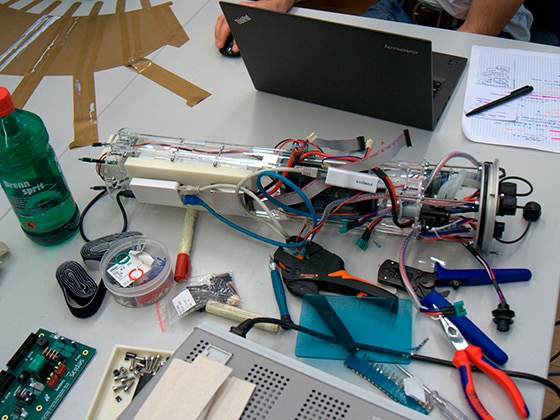
Assembly of the Sepios base unit (via Sepios)
Sepios can dive up to 10m deep in open water and swims while hardly making a sound. It features four fins powered by 9 servomotors each and can run for 90 minutes on a 7.4V battery. Each fin is positioned at 90-degree intervals around its cylindrical body, enabling for a wide variety of maneuvers, including forward and backwards swimming, sideways drifts and the ability to completely roll over. While we don’t see too many fish rolling over, Sepios’ maneuverability is impressive and gives it a 270-degree view of ocean life.
Although experimental, the cuttle-bot was being developed to run off a single 3D Connexion space mouse. The idea is that the mouse would speak to Sepios IMU, which would interpret these signals, send them to the unit’s torque vector and result in the movement of its fins. This would allow researchers to control the movement of the bot underwater. There hasn’t been talk about an autonomous Sepios, although with obstacle detection, anything is possible.
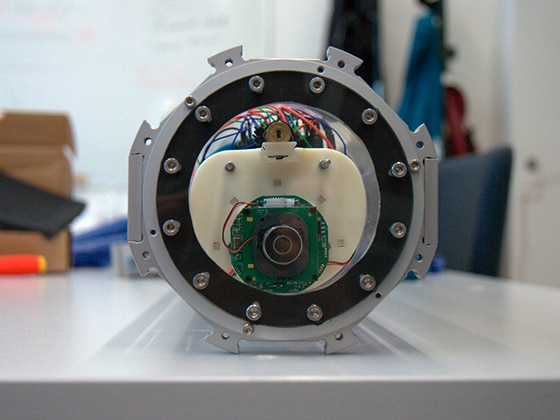
Sepios front view of camera and laser (via Sepios)
While Sepios opens up the realm of what is possible for nautical robots, it is not without its problems. The data cable connected to the unit when diving greatly limited mobility. Although the ETH team experimented with thinner cables, every cable minimized the mobility of the bot. With this, the servomotors were not strong enough to cut through the resistance of open water and many died long before the battery gave out. Lastly, and probably most alarming is that the robot wasn’t entirely waterproof. The team experimented with industrial plugs and while the water leaks didn’t result in irreversible damage to the unit, water-tightness is a necessary component for an underwater robot.
Although the team recently presented its findings at Techfest 2015 in Bombay, it does not have plans to develop another prototype. There is word about conducting a live test in the Mediterranean Sea, but those plans are currently up in the air. Whether or not this project continues, however, it represents an important advancement in nautical robots.
Sepios is the most maneuverable of any marine robot to date, and because it’s quiet, it could potentially swim side-by-side marine life without disturbing it. This would result in the capture of marine creatures in their natural states and habitats. While it can only dive 10m deep, it can still access a good number of marine species that live closer to the surface of the ocean. This is good news for marine biologists who want to study species that may be camera or people shy. It may also be good news for those who want to study sharks without jumping into cages and having to get up close and person with Jaws.
C
See more news at:
