


We have all see the videos of the intriguing yet somewhat frightening performance of Boston Dynamics’ humanoid “Atlas” robot running and jumping on top of boxes in dimly lit warehouses, but researchers at the University of Virginia School of Engineering in collaboration with researchers from Harvard University have developed the first robotic tuna fish that is more lifelike than anything before it. In a recently published, peer-reviewed, paper, the team which was led by Hilary Bart-Smith, a professor in UVA Engineering's Department of Mechanical and Aerospace Engineering, detailed their work in advancing the understanding of how fish propel themselves underwater.
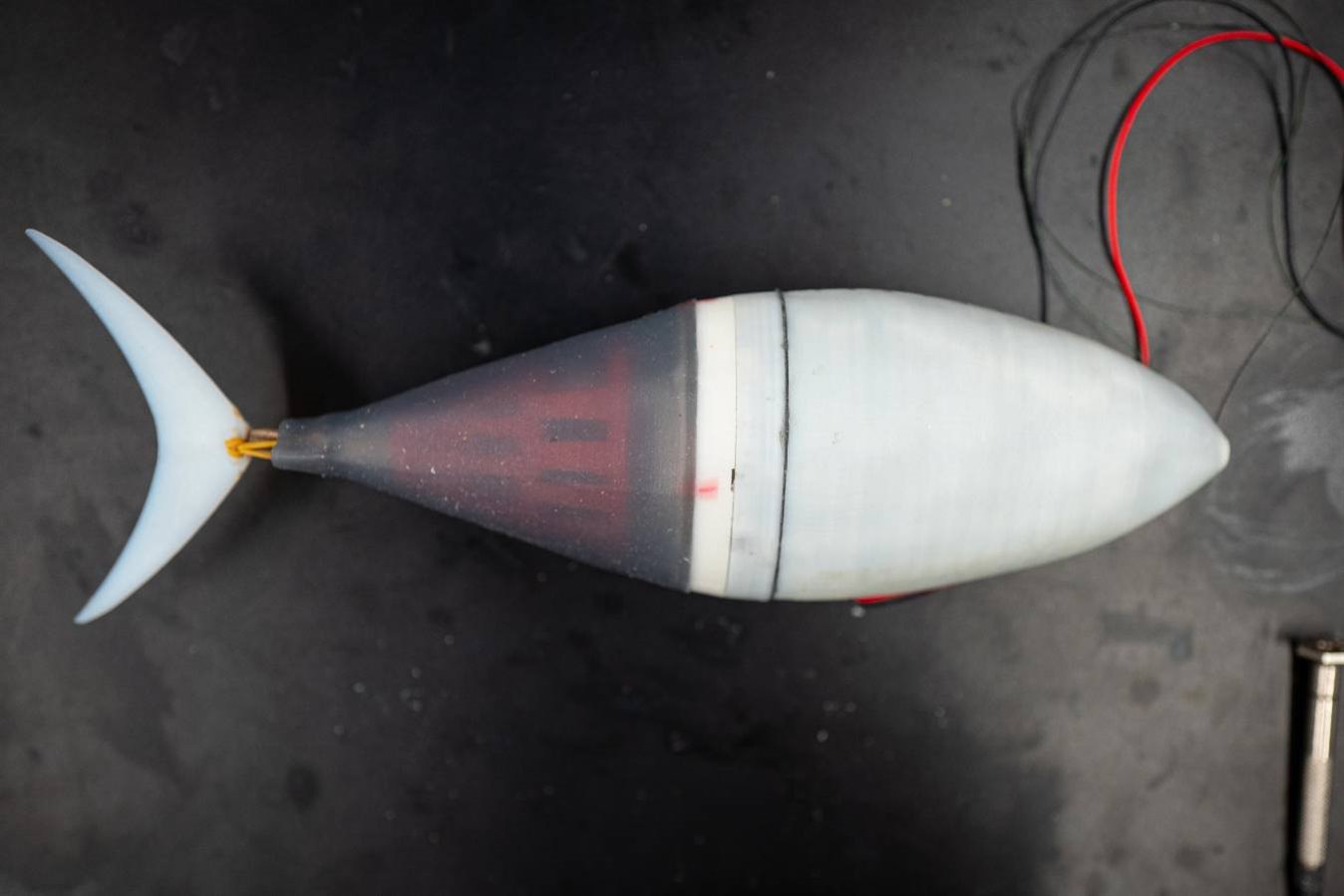
Image Credit: University of Virginia School of Engineering and Applied Science
Mechanical underwater propulsion has been around for well over a century now, but none of the current propeller and jet thrust methods of propulsion are as efficient as a biological fish can be. As this study shows, we are just now beginning to understand how fish are able to propel themselves so efficiently through the water, and that is leading to more bio-inspired robotic fish designs. For example, this study focused on the swimming dynamics of Yellow Fin Tuna and Mackerel, two of the ocean’s most efficient swimmers. The data that was collected by George V. Lander and his team of biologists, helped the robotics engineers which was made up of research scientist Jianzhong "Joe" Zhu and Ph.D. student Carl White, develope a working robot that looked and behaved very similar to a small yellowfin tuna.
"Our goal wasn't just to build a robot. We really wanted to understand the science of biological swimming," Bart-Smith said. "Our aim was to build something that we could test hypotheses on in terms of what makes biological swimmers so fast and efficient."
"What is so fantastic with the results we are presenting in the paper are the similarities between biology and the robotic platform, not just in terms of the swimming kinematics, but also in terms of the relationship between speed and tail-beat frequency and energy performance," Bart-Smith said. "These comparisons give us confidence in our platform and its ability to help us understand more about the physics of biological swimming."
Dubbed “Tunabot,” the robot fish’s life-like motion is partially due to a joint the team developed that helps to precisely mimic the complex motions made by a yellowfin tuna’s tail while swimming. When the Tunabot flexes its tail, the entire fish’s body moves back and forth, with the tail swinging the opposite direction that the back-half of the body moves. This unique tail motion gives the Tunabot the ability to not only swim quite similar to how a live yellowfin tuna swims, but it lets it swim by beating its tail back and forth at high-frequency allowing it to swim at nearly the same speed as its biological counterpart.

Image Credit: University of Virginia School of Engineering and Applied Science
The team of researchers utilized a large flow tank located in the Mechanical and Aerospace Engineering Building at UVA Engineering as well as in a similar tank located at Harvard. This allowed hours upon hours of testing of the robot’s hardware and software, studying the flow patterns created as the Tunabot moves through the water, and this gave unique insight for both the biologist and robotic engineers who worked on the project in conjunction with each other. The robot is about 10-inches in length, similar to a very young yellowfin tuna, a species that can grow up to seven feet long in nature and swim at speeds up to 50mph (80.46kph).
Image Credit: University of Virginia School of Engineering and Applied Science
"We don't assume that biology has evolved to the best solution," Bart-Smith said. "These fishes have had a long time to evolve to a solution that enables them to survive, specifically, to eat, reproduce and not be eaten. Unconstrained by these requirements, we can focus solely on mechanisms and features that promote higher performance, higher speed, higher efficiency. Our ultimate goal is to surpass biology. How can we build something that looks like biology but swims faster than anything you see out there in the ocean?"
Funding for this research was provided by the Office of Naval Research and is part of Bart-Smith's second, highly competitive Multidisciplinary University Research Initiative.
If you would like to read further, the full, peer-reviewed paper, "Tuna robotics: a high-frequency experimental platform exploring the performance space of swimming fishes," was published Sept. 18, 2019, in Science Robotics, and can be found here.
Top Comments