


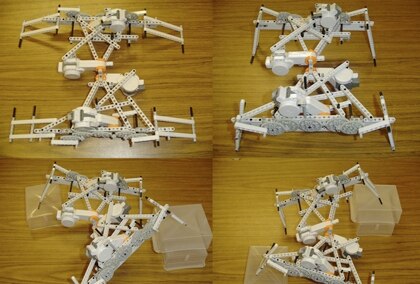
In a first-of-its-kind experiment, University of Vermont roboticist Josh Bongard created both simulated and actual robots that, like tadpoles becoming frogs, change their body forms while learning how to walk. And, over generations, his simulated robots also evolved, spending less time in ‘infant’ tadpole-like forms and more time in ‘adult’ four-legged forms. These evolving populations of robots were able to learn to walk more rapidly than ones with fixed body forms. And, in their final form, the changing robots had developed a more robust gait -- better able to deal with, say, being knocked with a stick -- than the ones that had learned to walk using upright legs from the beginning. Using a sophisticated computer simulation, Bongard unleashed a series of synthetic beasts that move about in a 3-dimensional space. “It looks like a modern video game,” he says. Each creatures -- or, rather, generations of the creatures -- then run a software routine, called a genetic algorithm that experiments with various motions until it develops a slither, shuffle, or walking gait -- based on its body plan -- that can get it to the light source without tipping over. Some of the creatures begin flat to the ground, like tadpoles or, perhaps, snakes with legs; others have splayed legs, a bit like a lizard; and others ran the full set of simulations with upright legs, like mammals. For more information on ‘robo-babies’ please visit: http://www.uvm.edu/~uvmpr/?Page=news&storyID=11482&category=uvmhome
Zero