In my last blog I showed how I successfully implemented data communication between to cores of PSoC 6 MCU using IPC Pipe. That was a getting started blog and I just used an GitHub example program by Infineon and mtb-example-psoc6-dual-cpu-empty-app came with ModusToolbox example program.
In this blog I will show you how I am sending Capsense touch detection data from CM0+ to CM4 CPU core. I am using CM0+ core for reading the Capsense buttons and slider and after reading those I am sending an unique value for each button to CM4 core. CM4 core receives those value and prints the value to serial monitor.
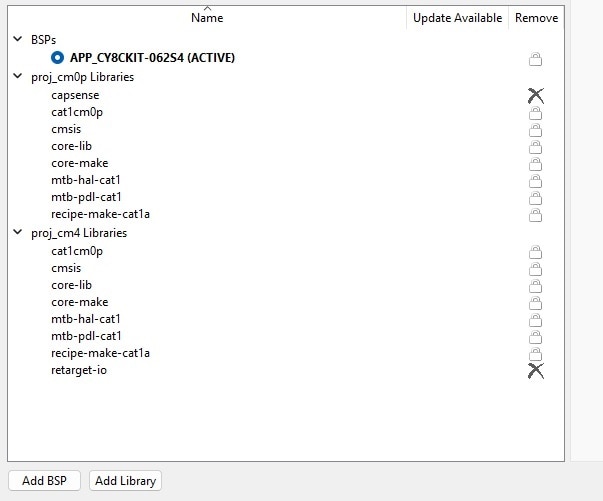
The Infineon HAL is not yet designed to run simultaneously on CM0+ and CM4 core. As CM4 app already uses HAL, CM0+ app should only use PDL APIs. As I am using CM0+ for capsensing I will use PDL API for it.
No changes is required for Makefiles. So, all Makefiles will be as it is.
I added Capsense library to cm0p_app.
Then I added the Capsense example code to the main.c source of CM0+ core app and build the program. After uploading the program to PSoC board the Capsense button was not working. After doing some research and debugging I was able to solve the issues. I needed to modify the ipc_communication_cm0p.c source file by removing user pipe from the source. So, instead of user_pipe for data exchange between cores what used in previous blog, here I am using system_pipe for sending capsense data from CM0+ to CM4 core. This is the modified and working ipc_communication_cm0p.c:
/*******************************************************************************
* Include header files
******************************************************************************/
#include "cy_pdl.h"
#include "ipc_communication.h"
#include "system_psoc6.h"
/*******************************************************************************
* Function definitions
******************************************************************************/
/*******************************************************************************
* Function Name: setup_ipc_communication_cm0
********************************************************************************
* Summary:
* - Initializes IPC Semaphore.
* - Configures CY_PIPE used for System calls, Flash, and BLE.
* - Configures USER_PIPE used in the example for sending CapSense touch
* detection data.
* - Initializes both CY_PIPE and USER_PIPE.
* - Initializes flash after CY_PIPE is initialized.
*
*******************************************************************************/
void setup_ipc_communication_cm0(void)
{
/* Allocate and initialize semaphores for the system operations. */
CY_SECTION(".cy_sharedmem")
static uint32_t ipcSemaArray[CY_IPC_SEMA_COUNT / CY_IPC_SEMA_PER_WORD];
(void) Cy_IPC_Sema_Init(CY_IPC_CHAN_SEMA, CY_IPC_SEMA_COUNT, ipcSemaArray);
/* Create an array of endpoint structures */
static cy_stc_ipc_pipe_ep_t systemIpcPipeEpArray[CY_IPC_MAX_ENDPOINTS];
Cy_IPC_Pipe_Config(systemIpcPipeEpArray);
static cy_ipc_pipe_callback_ptr_t systemIpcPipeSysCbArray[CY_SYS_CYPIPE_CLIENT_CNT];
static const cy_stc_ipc_pipe_config_t systemIpcPipeConfigCm0 =
{
{
CY_IPC_INTR_CYPIPE_EP0,
CY_SYS_INTR_CYPIPE_PRIOR_EP0,
CY_SYS_INTR_CYPIPE_MUX_EP0,
CY_IPC_EP_CYPIPE_CM0_ADDR,
CY_SYS_CYPIPE_CONFIG_EP0
},
{
CY_IPC_INTR_CYPIPE_EP1,
CY_SYS_INTR_CYPIPE_PRIOR_EP1,
0u,
CY_IPC_EP_CYPIPE_CM4_ADDR,
CY_SYS_CYPIPE_CONFIG_EP1
},
CY_SYS_CYPIPE_CLIENT_CNT,
systemIpcPipeSysCbArray,
&Cy_SysIpcPipeIsrCm0
};
/*
static cy_ipc_pipe_callback_ptr_t user_ipc_pipe_cb_array[USER_IPC_PIPE_CLIENT_CNT];
static const cy_stc_ipc_pipe_config_t user_ipc_pipe_config_cm0 =
{
{
USER_IPC_PIPE_INTR_EP0,
1UL,
USER_IPC_PIPE_INTR_MUX_EP0,
USER_IPC_PIPE_EP_ADDR_CM0,
USER_IPC_PIPE_EP0_CONFIG
},
{
USER_IPC_PIPE_INTR_EP1,
1UL,
0UL,
USER_IPC_PIPE_EP_ADDR_CM4,
USER_IPC_PIPE_EP1_CONFIG
},
USER_IPC_PIPE_CLIENT_CNT,
user_ipc_pipe_cb_array,
&user_ipc_pipe_isr_cm0
};
*/
Cy_IPC_Pipe_Init(&systemIpcPipeConfigCm0);
#if defined(CY_DEVICE_PSOC6ABLE2)
Cy_Flash_Init();
#endif /* defined(CY_DEVICE_PSOC6ABLE2) */
//Cy_IPC_Pipe_Init(&user_ipc_pipe_config_cm0);
}
/*******************************************************************************
* Function Name: Cy_SysIpcPipeIsrCm0
********************************************************************************
* Summary: User IRQ handler function that is called when IPC receives data from
* CM4 to CM0+ through USER_PIPE.
*
*******************************************************************************/
void Cy_SysIpcPipeIsrCm0(void)
{
Cy_IPC_Pipe_ExecuteCallback(CY_IPC_EP_CYPIPE_CM0_ADDR);
}
/*******************************************************************************
* Function Name: user_ipc_pipe_isr_cm0
********************************************************************************
* This is the interrupt service routine for the system pipe.
*
*******************************************************************************/
/*
void user_ipc_pipe_isr_cm0(void)
{
Cy_IPC_Pipe_ExecuteCallback(USER_IPC_PIPE_EP_ADDR);
}
*/
Here is the main.c source for CM0+ core where I am reading Capsense buttons and slider using PDL API, sending the data to CM4 core using IPC Pipe and at the same time controlling the user LED by the Capsense buttons and slider.
#include "cy_pdl.h"
#include "cybsp.h"
#include "cycfg.h"
#include "cycfg_capsense.h"
#include "led.h"
#include "ipc_communication.h"
/*******************************************************************************
* Macros
*******************************************************************************/
#define CAPSENSE_INTR_PRIORITY (3u)
#define EZI2C_INTR_PRIORITY (2u)
/*******************************************************************************
* Function Prototypes
*******************************************************************************/
static uint32_t initialize_capsense(void);
static void process_touch(void);
static void initialize_capsense_tuner(void);
static void capsense_isr(void);
static void capsense_callback(cy_stc_active_scan_sns_t *);
static void ezi2c_isr(void);
/*******************************************************************************
* Global Variables
*******************************************************************************/
volatile bool capsense_scan_complete = false;
cy_stc_scb_ezi2c_context_t ezi2c_context;
/*******************************************************************************
* Function Name: main
********************************************************************************
* Summary:
* System entrance point. This function performs
* - initial setup of device
* - initialize CapSense
* - initialize tuner communication
* - scan touch input continuously and update the LED accordingly.
*
* Return:
* int
*
*******************************************************************************/
volatile uint8_t msg_cmd = 0;
ipc_msg_t ipc_msg = { /* IPC structure to be sent to CM4 */
.client_id = IPC_CM0_TO_CM4_CLIENT_ID,
.cpu_status = 0,
.intr_mask = USER_IPC_PIPE_INTR_MASK,
.cmd = IPC_CMD_STATUS,
.value = 0
};
/****************************************************************************
* Functions Prototypes
*****************************************************************************/
void cm0p_msg_callback(uint32_t *msg);
int main(void)
{
cy_rslt_t result;
/* Init the IPC communication for CM0+ */
setup_ipc_communication_cm0();
/* Enable global interrupts */
__enable_irq();
/* Initialize the device and board peripherals */
result = cybsp_init();
/* Board init failed. Stop program execution */
if (result != CY_RSLT_SUCCESS)
{
CY_ASSERT(0);
}
/* Register callback to handle messages from CM4 */
//Cy_IPC_Pipe_RegisterCallback(USER_IPC_PIPE_EP_ADDR,
// cm0p_msg_callback,
// IPC_CM4_TO_CM0_CLIENT_ID);
Cy_IPC_Pipe_RegisterCallback(CY_IPC_EP_CYPIPE_CM0_ADDR,
cm0p_msg_callback,
IPC_CM4_TO_CM0_CLIENT_ID);
/* Enable CM4.*/
Cy_SysEnableCM4(CY_CORTEX_M4_APPL_ADDR);
initialize_led();
initialize_capsense_tuner();
/* Initialize CapSense */
result = initialize_capsense();
if (CYRET_SUCCESS != result)
{
/* Halt the CPU if CapSense initialization failed */
CY_ASSERT(0);
}
/* Initiate first scan */
Cy_CapSense_ScanAllWidgets(&cy_capsense_context);
//setup_ipc_communication_cm0();
//SystemCoreClockUpdate();
for (;;)
{
if (capsense_scan_complete)
{
/* Process all widgets */
Cy_CapSense_ProcessAllWidgets(&cy_capsense_context);
/* Process touch input */
process_touch();
/* Establishes synchronized operation between the CapSense
* middleware and the CapSense Tuner tool.
*/
Cy_CapSense_RunTuner(&cy_capsense_context);
/* Initiate next scan */
Cy_CapSense_ScanAllWidgets(&cy_capsense_context);
capsense_scan_complete = false;
}
}
}
/*******************************************************************************
* Function Name: initialize_capsense
********************************************************************************
* Summary:
* This function initializes the CapSense and configure the CapSense
* interrupt.
* Parameters:
* none
*
* Return
* uint32_t status - status of operation
*
*******************************************************************************/
static uint32_t initialize_capsense(void)
{
uint32_t status = CYRET_SUCCESS;
/* CapSense interrupt configuration parameters */
static const cy_stc_sysint_t capSense_intr_config =
{
.intrSrc = NvicMux3_IRQn,
.cm0pSrc = csd_interrupt_IRQn,
.intrPriority = CAPSENSE_INTR_PRIORITY,
};
/* Capture the CSD HW block and initialize it to the default state. */
status = Cy_CapSense_Init(&cy_capsense_context);
if (CYRET_SUCCESS != status)
{
return status;
}
/* Initialize CapSense interrupt */
Cy_SysInt_Init(&capSense_intr_config, capsense_isr);
NVIC_ClearPendingIRQ(capSense_intr_config.intrSrc);
NVIC_EnableIRQ(capSense_intr_config.intrSrc);
/* Initialize the CapSense firmware modules. */
status = Cy_CapSense_Enable(&cy_capsense_context);
if (CYRET_SUCCESS != status)
{
return status;
}
/* Assign a callback function to indicate end of CapSense scan. */
status = Cy_CapSense_RegisterCallback(CY_CAPSENSE_END_OF_SCAN_E,
capsense_callback, &cy_capsense_context);
if (CYRET_SUCCESS != status)
{
return status;
}
return status;
}
/*******************************************************************************
* Function Name: capsense_isr
********************************************************************************
* Summary:
* Wrapper function for handling interrupts from CapSense block.
*
* Parameters:
* none
*
* Return
* none
*
*******************************************************************************/
static void capsense_isr(void)
{
Cy_CapSense_InterruptHandler(CYBSP_CSD_HW, &cy_capsense_context);
}
/*******************************************************************************
* Function Name: ezi2c_isr
********************************************************************************
* Summary:
* Wrapper function for handling interrupts from EZI2C block.
*
*******************************************************************************/
static void ezi2c_isr(void)
{
Cy_SCB_EZI2C_Interrupt(CYBSP_EZI2C_HW, &ezi2c_context);
}
/*******************************************************************************
* Function Name: capsense_callback()
********************************************************************************
* Summary:
* This function sets a flag to indicate end of a CapSense scan.
*
* Parameters:
* cy_stc_active_scan_sns_t* : pointer to active sensor details.
*
* Return
* none
*
*******************************************************************************/
static void capsense_callback(cy_stc_active_scan_sns_t * ptrActiveScan)
{
capsense_scan_complete = true;
}
/*******************************************************************************
* Function Name: process_touch
********************************************************************************
* Summary:
* Gets the details of touch position detected, processes the touch input
* and updates the LED status.
*
* Parameters:
* none
*
* Return
* none
*
*******************************************************************************/
static void process_touch(void)
{
uint32_t button0_status;
uint32_t button1_status;
cy_stc_capsense_touch_t *slider_touch_info;
uint16_t slider_pos;
uint8_t slider_touch_status;
bool led_update_req = false;
static uint32_t button0_status_prev;
static uint32_t button1_status_prev;
static uint16_t slider_pos_prev;
static led_data_t led_data = {LED_ON, LED_MAX_BRIGHTNESS};
/* Get button 0 status */
button0_status = Cy_CapSense_IsSensorActive(
CY_CAPSENSE_BUTTON0_WDGT_ID,
CY_CAPSENSE_BUTTON0_SNS0_ID,
&cy_capsense_context);
/* Get button 1 status */
button1_status = Cy_CapSense_IsSensorActive(
CY_CAPSENSE_BUTTON1_WDGT_ID,
CY_CAPSENSE_BUTTON0_SNS0_ID,
&cy_capsense_context);
/* Get slider status */
slider_touch_info = Cy_CapSense_GetTouchInfo(
CY_CAPSENSE_LINEARSLIDER0_WDGT_ID, &cy_capsense_context);
slider_touch_status = slider_touch_info->numPosition;
slider_pos = slider_touch_info->ptrPosition->x;
/* Detect new touch on Button0 */
if((0u != button0_status) &&
(0u == button0_status_prev))
{
/* Turn USER LED ON */
led_data.state = LED_ON;
led_update_req = true;
ipc_msg.value = 0;
Cy_IPC_Pipe_SendMessage(CY_IPC_EP_CYPIPE_CM4_ADDR,
CY_IPC_EP_CYPIPE_CM0_ADDR,
(uint32_t *) &ipc_msg, NULL);
}
/* Detect new touch on Button1 */
if((0u != button1_status) &&
(0u == button1_status_prev))
{
/* Turn the USER LED off */
led_data.state = LED_OFF;
led_update_req = true;
ipc_msg.value = 1;
Cy_IPC_Pipe_SendMessage(CY_IPC_EP_CYPIPE_CM4_ADDR,
CY_IPC_EP_CYPIPE_CM0_ADDR,
(uint32_t *) &ipc_msg, NULL);
}
/* Detect the new touch on slider */
if ((0 != slider_touch_status) &&
(slider_pos != slider_pos_prev))
{
led_data.brightness = (slider_pos * 100)
/ cy_capsense_context.ptrWdConfig[CY_CAPSENSE_LINEARSLIDER0_WDGT_ID].xResolution;
led_update_req = true;
ipc_msg.value = slider_pos * 100;
Cy_IPC_Pipe_SendMessage(CY_IPC_EP_CYPIPE_CM4_ADDR,
CY_IPC_EP_CYPIPE_CM0_ADDR,
(uint32_t *) &ipc_msg, NULL);
}
/* Update the LED state if requested */
if (led_update_req)
{
update_led_state(&led_data);
}
/* Update previous touch status */
button0_status_prev = button0_status;
button1_status_prev = button1_status;
slider_pos_prev = slider_pos;
}
/*******************************************************************************
* Function Name: initialize_capsense_tuner
********************************************************************************
* Summary:
* Initializes interface between Tuner GUI and PSoC 6 MCU.
*
* Parameters:
* none
*
* Return
* none
*
*******************************************************************************/
static void initialize_capsense_tuner(void)
{
/* EZI2C interrupt configuration structure */
static const cy_stc_sysint_t ezi2c_intr_config =
{
.intrSrc = NvicMux2_IRQn,
.cm0pSrc = CYBSP_EZI2C_IRQ,
.intrPriority = EZI2C_INTR_PRIORITY,
};
/* Initialize EZI2C */
Cy_SCB_EZI2C_Init(CYBSP_EZI2C_HW, &CYBSP_EZI2C_config, &ezi2c_context);
/* Initialize and enable EZI2C interrupts */
Cy_SysInt_Init(&ezi2c_intr_config, ezi2c_isr);
NVIC_EnableIRQ(ezi2c_intr_config.intrSrc);
/* Set up communication data buffer to CapSense data structure to be exposed
* to I2C master at primary slave address request.
*/
Cy_SCB_EZI2C_SetBuffer1(CYBSP_EZI2C_HW, (uint8 *)&cy_capsense_tuner,
sizeof(cy_capsense_tuner), sizeof(cy_capsense_tuner),
&ezi2c_context);
/* Enable EZI2C block */
Cy_SCB_EZI2C_Enable(CYBSP_EZI2C_HW);
}
/*******************************************************************************
* Function Name: cm0p_msg_callback
********************************************************************************
* Summary:
* Callback function to execute when receiving a message from CM4 to CM0+.
*
* Parameters:
* msg: message received
*
*******************************************************************************/
void cm0p_msg_callback(uint32_t *msg)
{
ipc_msg_t *ipc_recv_msg;
if (msg != NULL)
{
/* Cast the message received to the IPC structure */
ipc_recv_msg = (ipc_msg_t *) msg;
/* Extract the command to be processed in the main loop */
msg_cmd = ipc_recv_msg->cmd;
}
}
/* [] END OF FILE */
And the main.c source for the CM4 core is as follows. This code is used to receive the IPC message from CM0+ and print the value to the serial monitor.
*******************************************************************************/
#include "cy_pdl.h"
#include "cyhal.h"
#include "cybsp.h"
#include "cy_retarget_io.h"
#include "ipc_communication.h"
#include <stdio.h>
/****************************************************************************
* Functions Prototypes
*****************************************************************************/
void cm4_msg_callback(uint32_t *msg);
/****************************************************************************
* Global Variables
*****************************************************************************/
/* Message variables */
volatile bool msg_flag = false;
volatile uint32_t msg_value;
int main(void)
{
cy_rslt_t result;
/* Init the IPC communication for CM4 */
setup_ipc_communication_cm4();
/* Initialize the device and board peripherals */
result = cybsp_init() ;
if (result != CY_RSLT_SUCCESS)
{
CY_ASSERT(0);
}
/* Enable global interrupts */
__enable_irq();
/* Initialize retarget-io to use the debug UART port */
cy_retarget_io_init(CYBSP_DEBUG_UART_TX, CYBSP_DEBUG_UART_RX, CY_RETARGET_IO_BAUDRATE);
/* Register the Message Callback */
Cy_IPC_Pipe_RegisterCallback(CY_IPC_EP_CYPIPE_CM4_ADDR,
cm4_msg_callback,
IPC_CM0_TO_CM4_CLIENT_ID);
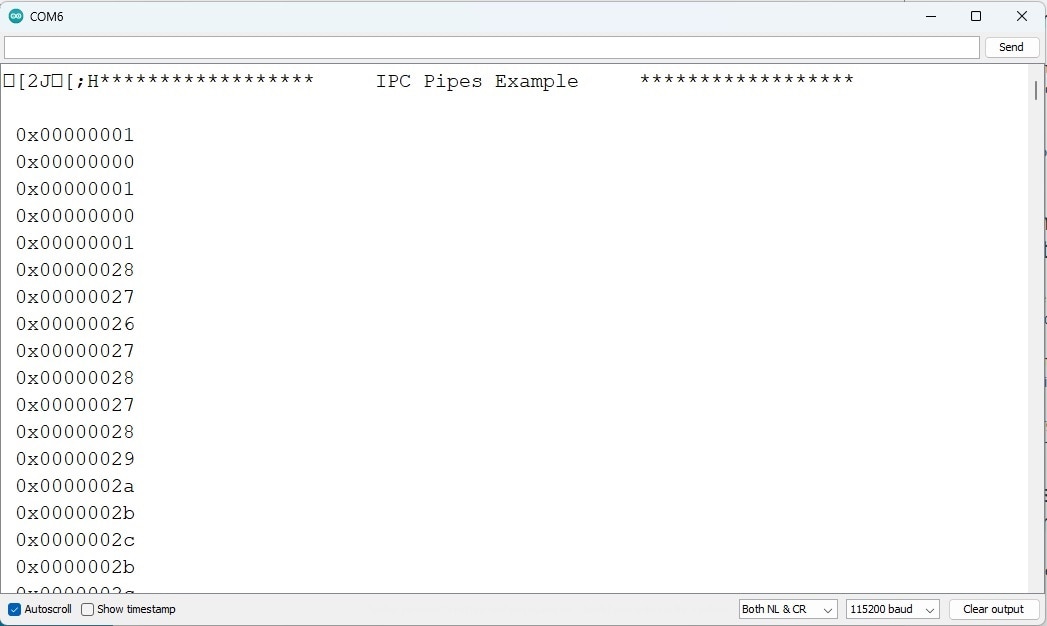
/* \x1b[2J\x1b[;H - ANSI ESC sequence for clear screen */
printf("\x1b[2J\x1b[;H");
printf("****************** \
IPC Pipes Example \
****************** \r\n\n");
for (;;)
{
//cyhal_syspm_sleep();
/* Check if a message was received from CM0+ */
if (msg_flag)
{
msg_flag = false;
/* Print random number received from CM0+ */
printf(" 0x%.8x\n\r", (unsigned int) msg_value);
}
}
}
/*******************************************************************************
* Function Name: cm4_msg_callback
********************************************************************************
* Summary:
* Callback function to execute when receiving a message from CM0+ to CM4.
*
* Parameters:
* msg: message received
*
*******************************************************************************/
void cm4_msg_callback(uint32_t *msg)
{
ipc_msg_t *ipc_recv_msg;
if (msg != NULL)
{
/* Cast received message to the IPC message structure */
ipc_recv_msg = (ipc_msg_t *) msg;
/* Extract the message value */
msg_value = ipc_recv_msg->value;
/* Set message flag */
msg_flag = true;
}
}
/* [] END OF FILE */
Value printed in the serial monitor: