


Welcome to my first blog - Robotic Hand Introduction
My proposal for "Design for a Cause" is to make a muscle controlled robotic hand. I know this isn't an original idea, but my goal is to make it affordable. I will be using the Arduino Nano 33 IOT Board along with a sensor board I will be making. I will 3d print the robotic parts along with using servos to create an inexpensive muscle controlled robotic hand. When complete, hopefully it will make this robotic hand affordable to anyone in need.
Concept:
Muscles generate electrical signals. Although small, it can be monitored with the correct hardware. After a lot of research and information gathering, I feel I can create a sensor board that can register those electrical signals. These are called Electromyography Sensor (EMG) or simplified, electrical muscle recorder. The TI INA828 integrated circuit will do just that, read the electrical signals of the muscle.
I will be using 5 main pieces of hardware to create this sensor:
- Instrumentation Amplifier – Texas Instruments INA828 IC
- Diode – TS4148RYG
- Capacitor – 47uF
- Surface electrodes that will attach to your skin close to the muscles.
- 6 - 8 Servos
The sensor requires 3 electrodes, a negative, positive and ground. The positive and negative are placed adjacent to each other, over the muscle you want to monitor, separated by a 1cm gap. The ground electrode is placed over a bony area with minimal to no muscle.
The signals from the sensor go into the Arduino Nano 33 IOT Board. With parameters calculated, the Arduino will activate the correct servo to move each finger individually (Hopefully).
This project is important to me, being in the woodworking industry many people loose their hand (I was very close to losing mine). For myself, I had a table saw accident in which my hand hit the saw blade and cut it in half. I consider myself lucky that it wasn't worse. It still took a 5 hour surgery and 1 year of physio for me to be able to write again.
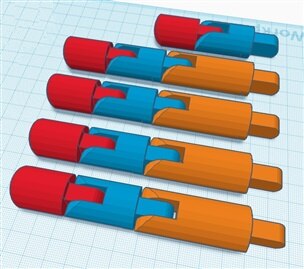
Below is the 3d printer picture of the fingers I designed
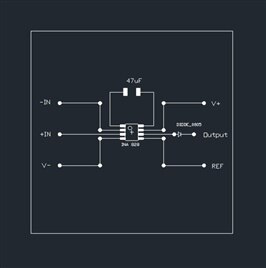
Below is a picture of the PCB I will be making for the sensor (This may change as I learn more about the INA828 IC)
Working theory:
When this is all together, the Arduino NANO 33 IOT will receive the signal from my sensor. I will program the Arduino to know which muscle sent the signal, it then can tell which servo it needs to rotate for the correct finger to move.
Thank you for reading!!
Dale Winhold
Top Comments