


The accelerometer data can be used to detect the minute vibrations during the elephant's walk or poachers vehicle or illegal deforestation
etc.I would like to create 4 different models here to detect different scenarios.
<html><head><title>Jive SBS</title></head>
<body><font face="arial,helvetica,sans-serif">
<b>Error</b><br><font size="-1">
An general error occurred while processing your request.
</font></font></body></html>
CLI tool showing that the device is connected to the edge impulse and you can start training the model.
<html><head><title>Jive SBS</title></head>
<body><font face="arial,helvetica,sans-serif">
<b>Error</b><br><font size="-1">
An general error occurred while processing your request.
</font></font></body></html>
Web UI of edge impulse training data
<html><head><title>Jive SBS</title></head>
<body><font face="arial,helvetica,sans-serif">
<b>Error</b><br><font size="-1">
An general error occurred while processing your request.
</font></font></body></html>
Web UI of creating a model with the trained data
<html><head><title>Jive SBS</title></head>
<body><font face="arial,helvetica,sans-serif">
<b>Error</b><br><font size="-1">
An general error occurred while processing your request.
</font></font></body></html>
Feature explorer

Initial training results
<html><head><title>Jive SBS</title></head>
<body><font face="arial,helvetica,sans-serif">
<b>Error</b><br><font size="-1">
An general error occurred while processing your request.
</font></font></body></html>
Download the library
Import the library by going to arduino >> sketch >> include library
Complete tutorial by edge impulse is here.
You'll need to add the raw feature data before uploading the code to the device. Use the static buffer code and add the following code before your main library definition
This is needed for the SAMD21 boards, if you get any error use the documentation here
#include <cstdarg>
#define __STATIC_FORCEINLINE __attribute__((always_inline)) static inline
#define __SSAT(ARG1, ARG2) \
__extension__ \
({ \
int32_t __RES, __ARG1 = (ARG1); \
__ASM volatile ("ssat %0, %1, %2" : "=r" (__RES) : "I" (ARG2), "r" (__ARG1) : "cc" ); \
__RES; \
})
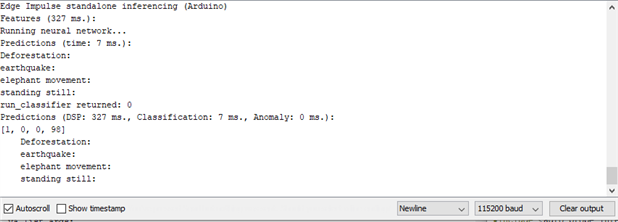
Results from the model detecting the standing still motion with 98% accuracy.