


Summary and Current Status
My entry for the Experimenting with Sensor Fusion from Element14 and AMD/Xilinx Design Challenge is a Visual Simultaneous Localization and Mapping (VSLAM) platform for navigation of indoor spaces. This is an ambitious project that includes FPGA digital logic design, embedded software development, and algorithm development. And while I was not able to achieve all of my goals by the due date for this project, I was able to pull together a system consisting of a soft CPU core, a MIPI CSI-2 video processing tool chain, and custom RTL blocks that will compose the finished VSLAM system. I will share the present state of this project, my design rationale, some challenges I encountered, and future steps. It was a privilege to participate in this design challenge, and I would like to thank Element14 and AMD/Xilinx for providing the hardware for these experiments.
Sensor Overview
Sensor fusion applications combine data from different sensors to determine properties about a system that typically can’t be measured directly. A classic example from aviation is to combine altitude (altimeter), airspeed velocity (air flow meter), and direction (magnetic compass) measurements to determine the trajectory of an aircraft. A more advanced version of thisproblem could incorporate radar, GPS, and/or measurements from redundant sensors to increase accuracy and robustness of the aircraft path. More recent examples of data fusion includes self driving and autonomous systems, augmented reality, and scanning/mapping applications. A sensor fusion application is more that the sum of its parts. The hardware provided for this design challenge is PCAM 5C camera module, a PMOD NAV IMU, and a SP701 Spartan-7 Evaluation Kit.
PCAM 5C
The PCAM 5C is a fixed focus, five megapixel camera from Digilent (https://digilent.com/shop/pcam-5c-5-mp-fixed-focus-color-camera-module/). This camera conforms to the MIPI CSI-2 standard for mobile camera devices (https://www.mipi.org/specifications/csi-2#). The PCAM 5C camera module provides the “visual” portion of Visual Simultaneous Localization by providing the image sequence for visual odometry.
PMOD NAV IMU
Digilent’s PMOD NAV (https://digilent.com/shop/pmod-nav-9-axis-imu-plus-barometer/) is an 9-axis plus barometer IMU (inertial measurement unit) plus barometer. This module is based on two devices: a LSM9DS1 iNEMO 9-axis IMU and a LPS25HB digital barometer, both from ST Microelectronics. By combining both devices on a single module, positioning information can be extracted from the module. The three axis accelerometer provides acceleration information, which can be integrated twice to determine relative position. The three axis gyroscope provides angular rotation about the local x-, y-, and z- axes. The three axis magnetometer provides module orientation information with respect to the Earth’s magnetic field, and finally, the barometer can provide a height estimate using the relative change in pressure. The sensor module provides a single SPI interface, where individual sensors are addressed using three chip select signals which are detailed in the user manual (https://digilent.com/reference/pmod/pmodnav/reference-manual).
AMD/Xilinx SP701 Spartan-7 Evaluation Kit
Based on the Xilinx Spartan-7 XC7S100, and having over 100k logic cells, the AMD/Xilinx SP701 Spartan-7 FPGA Evaluation kit is capable of complex system designs consisting of soft CPU cores, sensors, and signal processing chains. The Xilinx SP701 is responsible for conditioning and combining sensor data in this project. The PCAM 5C is connected via ribbon cable to the SP701 MIPI CSI-2 camera ribbon connector (J8) and the PMOD NAV IMU is connected to the SP701 PMOD1 connector (J14).

Classical VSLAM Overview and Project Objectives
Visual Simultaneous Localization and Mapping (VSLAM) is a sensor fusion technique that commonly combines visual odometry with system orientation to simultaneously map out an environment and determine the location within the environment. Common applications are robotics, autonomous vehicles, 3D scanning and computer vision. This technique is well suited for indoor environments where GPS is unavailable and in the absence of other positioning markers, beacons, etc. [GA021]
VSLAM Assembly
The mapping platform assembly is to mount the PCAM 5C in a fixed positition that looks down from the SP701 evaluation board. The PMOD NAV IMU module will be attached to the PMOD1 port on the SP701. A 3D printed case is being being designed to simultaneously position the camera and secure the IMU as well as handles to hold the asseembly while testing the VSLAM platform. Since I don’t have a 3D printer at the time of this writing, the printed case structure will be completed at a later date.
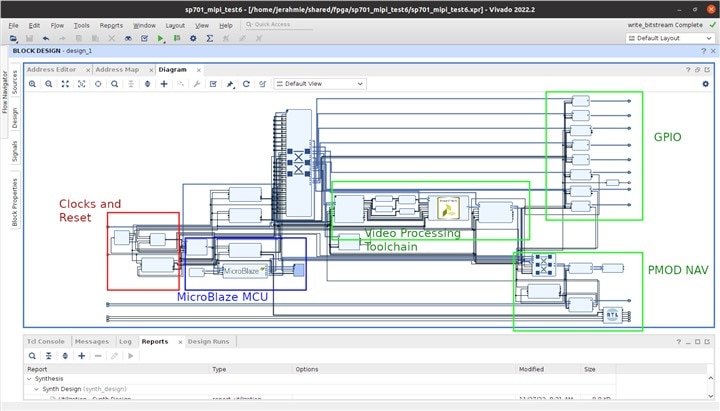
Logic Design, IP Layout, and Custom Logic Overview
At the top level, this is a microcontroller-based system with supporting digital logic to interface with the PCAM 5C and the PMOD NAV IMU peripherals. The system state, the VLAM algorithms, as well as all external communications will be controlled by the, soft microcontroller. A combination of Xilinx IP as well as custom logic collect, filter, and process raw sensor module data to minimize the amount of work required of the microcontroller.
The SP701 has ample resources to implement a soft CPU core with required subsystems. I initially wanted to use an Arm Cortex M1 or M4 soft microcontroller as the basis for this project since I have more experience using Arm architecture from Zynq 7000 projects. The Arm Cortex M1 and M4 IP is available free of charge through Arm DesignStart FPGA program with access provided directly by Arm. While my early impressions of using the Arm core were promising, I ultimately decided to use a Xilinx MicroBlaze Soft Processor core. While this was my was my fist experience using a MicroBlaze core, I was able to get up and running up and running quickly thanks to a wide selection of documentation and examples provided by Xilinx.
Since the PMOD 5C camera implements the MIPI CSI-2 standard, I was able to leverage Xilinx IP to capture and process image data. The MIPI CSI-2 Receiver Subsystem module consists of a MIPI PHY module for interfacing to the camera module. And the output is an AXI-stream video data signal that undergoes further signal processing. A custom logic block to perform the visual odometry is still under development. The is a custom Verilog block that will take the AXI-stream video signal as input and the output is an estimated distance (dx, dy).
The final custom logic block is the PMOD NAV IMU module. This is another Verilog module that implements the SPI interface to provide orientation data for the sensor fusion algorithm. Digilent provides an IP module for the PMOD NAV IMU, however, the documentation states that it is for pre-Vitis versions of Vivado. I had concerns that I would not be able to use the IP as-is, and since the module supports a straight-forward SPI interface, I felt comfortable creating my own implementation.
My preference for RTL development is to use open source tools whenever possible. I use Icarus Verilog for module and testbench development. I then import the custom RTL components into the hardware design. After the Verilog components are finalized, the Verilog hardware can be exported to Vitis for software development.
Software Overview
In the Xilinx ecosystem, the hardware design from the previous section is exported to the Vitis IDE. Vitis is a relatively new replacement for the Xilinx ISE software IDE, but fortunately Xilinx provides an excellent tutorial to implement a MicroBlaze core on the SP701 evaluation board (https://xilinx.github.io/Embedded-Design-Tutorials/docs/2021.2/build/html/docs/Feature_Tutorials/microblaze-system/README.html). I decided to take a detour from my design to complete this tutorial since this is my fist experience implementing a full MicroBlaze system and using Vitis.
Right now the software components of this project are in the “Hello World” phase. It can quite literally print “Hello World” over the UART serial connection. When considering all the components that must be in place for this to work, it is actually quite motivating to tackle future algorithm implementation that will be the heart of the VSLAM platform. My next step will be to replace “Hello World” with integration tests to ensure my custom RTL blocks perform as expected in the FPGA implementation.
Conclusions, Comments, and Next Steps
I had a lot of fun participating in the Experimenting with Sensor Fusion Design Challenge from Element14 and AMD/Xilinx. FPGAs are essentially blank slates, so it was a little overwhelming to get started. I had a couple false starts when settling on the system architecture. My initial designs used Arm microcontroller soft cores, which I reasoned would be more useful if I want to re-implement this logic on a Zynq 7000 or Zynq Ultrascale MPSoC system. In the end, I found the MicroBlaze examples from to be easy to use and the fastest way to get from zero to a running platform. However, in the future I would like to revisit an Arm Cortex M1 or M4 version of this project.
Because the PCAM 5C conforms to the MIPI CSI-2 standard, the Xilinx IP integration tools were a fast way to create a video signal processing workflow. This allowed me to identify targeted regions where custom RTL can be developed to add my own functionality to the system. I did find some challenges with IP between different versions of Vivado. This wasn’t an issue for stable IP packages, but there were some instances where noticibly different IP interfaces were present when one Xilinx example was created with a previous Vivado version and I attempted to open it in a newer version. Additionally, some IP was not supported at all in recent versions of Vivado. That said, FPGA design strategy was orders of magnitude faster that pure RTL design strategies.
The project repository is located at https://github.com/jerahmie/sensor_fusion_vslam.git. I intend to continue to develop this platform over the next few months to finish implementing the final VSLAM algorithms. What I learned through this design challenge can be incorporated in future projects.
References
[GA021] Gao, X.; Zhang, T. Introduction to Visual SLAM: From Theory to Practice; Springer Nature: Berlin, Germany, 2021.