HI all,
I'm in the process of building a model crane,
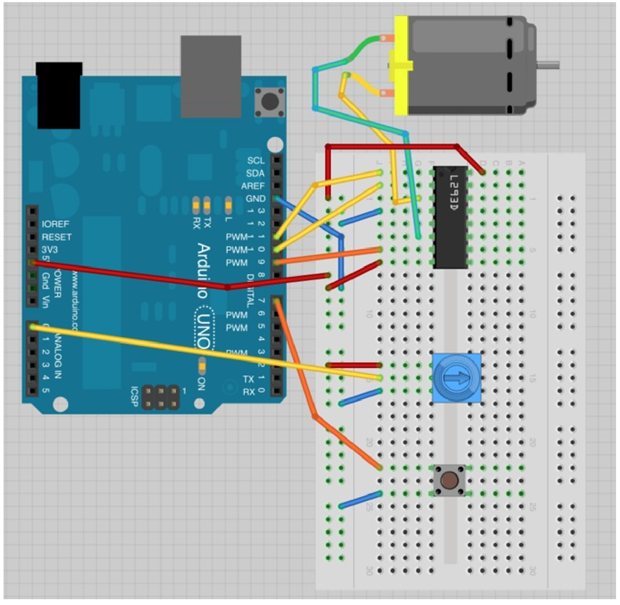
i'm using an arduino with a motor control IC to operate three motors separately along with a 10K potentiometer to adjust the rotational speed,
!! What i'm having trouble with is !!
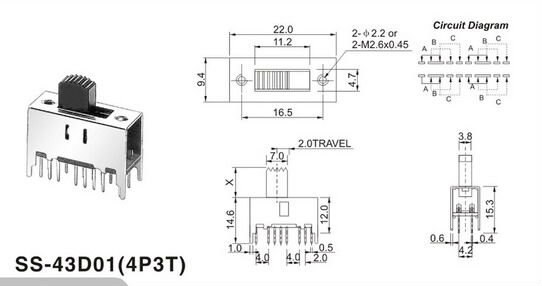
I have a 4P3T Slide switch that i want to wire up as FORWARD/OFF/REVERSE, but i have no idea what im doing i have a circuit diagram of this from the interwebs but still no clue on what to do,
any help would be greatly appreciated
THANK YOU!!!!!!!!!!