


I have been spending entirely too much time trying to get the drive train to be functional, but I still need to devote some time to describing what I have been up to. The Linix motor is great - lots of power, but it runs between 300 and 4000 rpm. I need this speed to be reduced by a factor of about 4000 to get reasonable control and accuracy in my solar tracking application.
There are nice gearboxes (like the one below) made for this particular motor, but I cannot afford them:
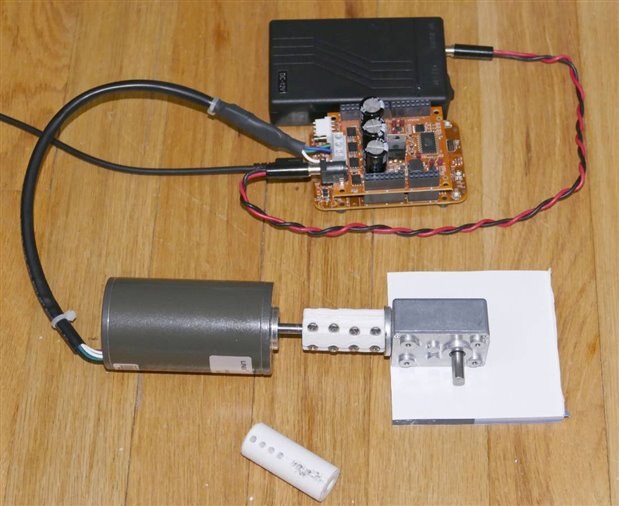
I explored a lot of options as this can be an expensive aspect of the system. I procured several adpters, flex-couplers and gearboxes, to try to cobble a workable combination together, but every component in the system has its own set of problems, each of which requires time and usually money to resolve. The picture below shows a gearbox I obtained by butchering a perfectly good gearmotor, but of course the gearbox driveshaft is a different diameter from the motor driveshaft, so an adapter is needed. The commercial coupler I ordered has not arrived and might not arrive in time for this project, so I have been attempting to make a suitable coupler. The unconnected cyclindrical coupler in the picture caused huge vibration because it could not maintain accurate axial alignment. The clamping coupler shown connected, was a little better, but still not good enough. I hind sight, butchering the gearmotor the way I did was not the best solution. It left only a single bushing in the gearbox to control the driveshaft. And of course I bent the driveshaft a bit in the process - very difficult to straighten accurately.
It appears that I cannot hold tolerances accurately enough to avoid significant vibration, so I will have to try some kind of very flexible coupling. I expect that will take a few more hours and probably several iterations.
One other nasty issue is that all the nice dimensioned drawings of the gearbox do not show the exact location of the input driveshaft (because it is internal to the gearmotor) and it is not in the middle either vertically or horizontally. Which is going to make building a chassis a tricky problem.
The gearbox has a ratio of about 266:1 which is a good reduction but it is not quite enough - it still leaves the output shaft rotating at over 6 degrees per second. My plan is to put a pulley on the output shaft that will reduce the speed by 14:1. This will get the speed down to about 1 degree every 2 seconds. The sun is progressing much slower at about 1 degree every 4 minutes, so the motor only needs to run 0.2% of the time to keep up.
This image shows part of the pulley - I expect to use a separate take-up reel. The 2 clamps will be used to mount the reels to what is left of the handlebars described in earlier blogs. You can see the convoluted threading path for the belt internal to the reel. This is a very tight fit and does a good job preventing the belt from slipping. The aluminum drive sprocket is also shown in the picture just to get an idea of the gear ratio.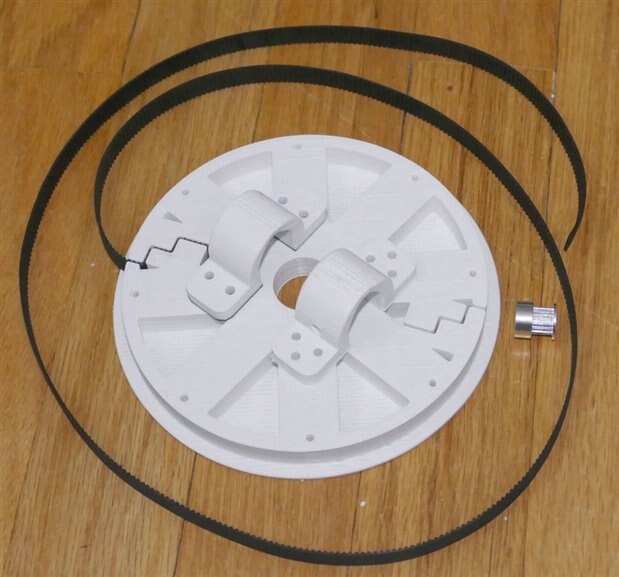
The project is proceeding too slowly despite putting a lot of hours into it, however I am learning a lot about what not to do. Some things like the pulley look like they will work on the first try while others such as the shaft coupler look like they will take many iterations. The drivetrain chassis is definitely going to be difficult.
Relevant Links
The full set of Clear Walk project blogs can be found here:
Top Comments