


First impressions on getting started with the Motor controller has been poor, I give it 4 out of 10.
here are a couple of the reasons:
First thing I did when I opened the dev board box was look at the quick start pamphlet which did not have the polarity of the power jack, in fact none of the documentation i have seen state it.
Next I typed in the url stated in the quick start pamphlet and bam 404.
The power jack was easy enough to figure out though, checking continuity to the case of the USB connector told me that the center pin was positive.
I follower the Jump In guide on the website and nothing worked however the getting started guide in the install folder was a very good step by step to get things moving. I can spin the motor and talk to the PCB via the uart.
I have not managed to get the KMS working, it allegedly cannot verify communication to the com port, but the hello world demo seems to have no trouble with it so I do not know what the real issue is I tried reinstalling the driver with no success. The only think I can think is the problem is that while following one of the getting started guides I did a full erase on the board unknowingly, and now the KMS firmware is gone for good. I could not find out if there is a way to tell if this is the case though.
I feel like I am missing out on an important selling point for this dev board by not being able to use the KMS but I do not have the time to play with these finicky things, and if I did erase it there is no way it will ever work.
The motor spinning demo has raised some consistency concerns the motor does not always successfully start, and once it fails to start it never seems to attempt again, this is a sensor less demo, and I cannot see that there is a bug in the demo software.
I did a few speed tests and it seems that the systems minimum RPM is 500. below that nothing happens. I may later do some torque test at the different speeds.
Mechanical failure time now!
In fairness I did not hold much hope in this idea from the start, I still think it could work but it was just too finicky for me.
This all started when I from this gear I have no idea where It comes from and I have no other gears that mate with it so I am stumped.

but any way it fits perfectly on the shaft of the motor, so I wanted to use it for that reason alone so I decided to try make a mating gear for it. Though it turned out more like a mildly lethal weapon for a junk yard transformer.
| CD with template | cut some guides | gear before cleaning |
|---|---|---|
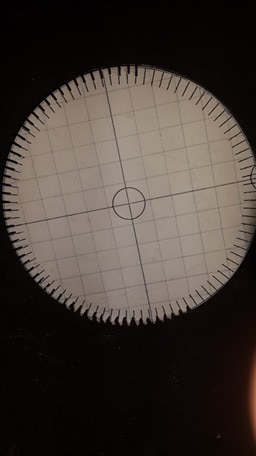 | 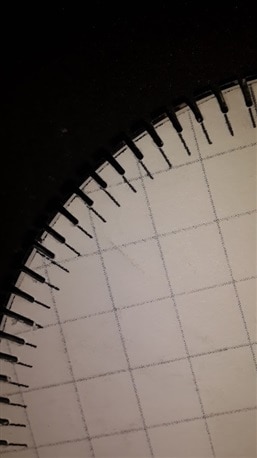 |  |
CD's have extremely accurately geometry, are fairly ridged and are able to turn at impressive speeds. this one was really just a proof of concept had it worked I would have glued a coupe together for more rigidity. but it was not a wild success, there go my dreams of a nobel recycling prize.

I made the tooth template from https://www.woodgears.ca/gear_cutting/template.html for any one who is interested.
Really what failed this particular CD where the lack of accuracy of the gear teeth, and the stability of the axial it was on. At 4000 rpm one of the CD's teeth came off and dreams where shattered. The gear only offered 1:5 ratio anyway so It was not a silver bullet.
That all for now.

