


To see all my post about this challenge
新年快樂
過年期間比較空閒,補一下進度。
買了幾塊加速度感測器,先選MPU6050來玩,搭配Nucleo32-F031K6。
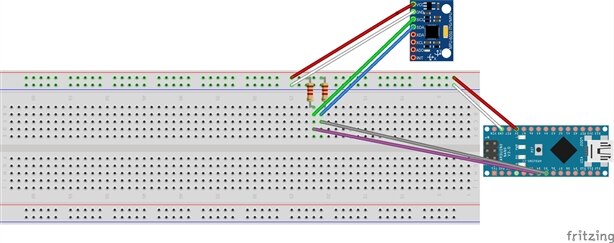
接線圖如下,Eagle還不熟,只好先用Fritzing畫。
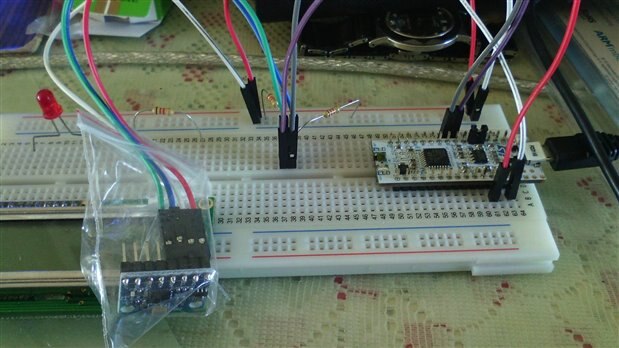
實際接出來長這樣,配線顏色特別符合上圖。
MPU6050是使用IIC通訊,這部分前幾個禮拜才剛學著用,所以不太熟。還好mbed上有前人完成好的範例可以參考,
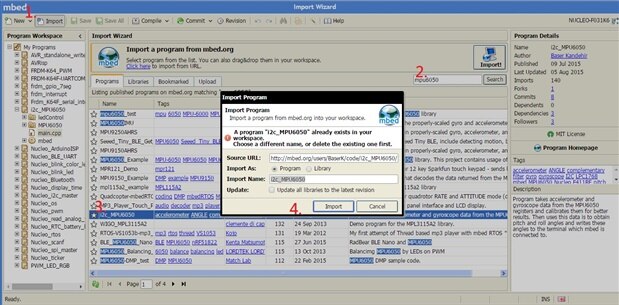
Import Baser Kandehir 建立的I2C_MPU6050 ,修改成Nucleo32-F031K6腳位後測試結果是OK的。
確定了這個線路是可行的,接下來就是修改程式,依範例修改來得到我要的值。
目前的while loop裡的碼
while(1)
{
/* Uncomment below if you want to see accel and gyro data */
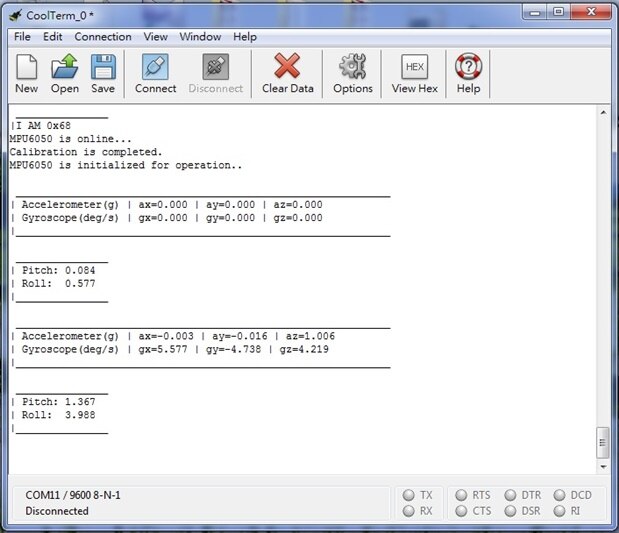
pc.printf(" _____________________________________________________________ \r\n");
pc.printf("| Accelerometer(g) | ax=%.3f | ay=%.3f | az=%.3f \r\n",ax,ay,az);
pc.printf("| Gyroscope(deg/s) | gx=%.3f | gy=%.3f | gz=%.3f \r\n",gx,gy,gz);
pc.printf("|_____________________________________________________________ \r\n\r\n");
wait(2.5);
filter.attach(&compFilter, 0.005); // Call the complementaryFilter func. every 5 ms (200 Hz sampling period)
pc.printf(" _______________\r\n");
pc.printf("| Pitch: %.3f \r\n",pitchAngle);
pc.printf("| Roll: %.3f \r\n",rollAngle);
pc.printf("|_______________\r\n\r\n");
wait(1);
}目前的想法是先試試提高取樣頻率,輸出值後先用excel計算過,等套件來時再測試聲調。
除了MPU6050模組買了5塊外,我還買了MMA7455跟ADXL345各一塊,目前會先全部使用MPU6050模組。
