


As part of the previous blog post we setup a simple circuit with a servo and Raspberry Pi A+, to test the code we are going to use for the keyless door entry mechanism.The code included a python-flask web application that you can open in your browser when your outside the door, and then enter a password to open it. Here is the link to the blog post
Pi Control Hub:Spoke3: Key-less Door entry-testing the Servo
As part of this blog, we are going to 3D print parts, to house the Raspberry Pi A+ and a mount for the the servo.
Here is a video demo keyless door entry mechanism in action ..
To add the 3D printed parts to the door knob, you will have to remove the existing door mechanism, and also remove the metallic rod just behind the open/close knob,.We will use this metallic part to add to the 3D printed part which will then connect to the servo horn.
| {gallery:width=900,height=400,autoplay=true} 3D printing and putting together the KeyLess Door Entry mechanism |
|---|
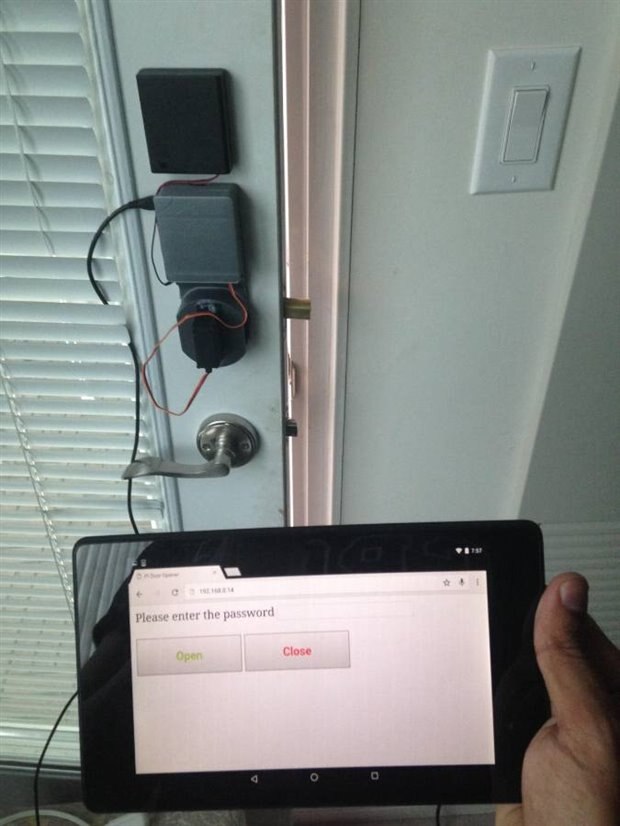
Final setup of the Door Lock mechanism, which includes 3D printed parts + Servo and the Pi A+ mounted on the door lock bolt |
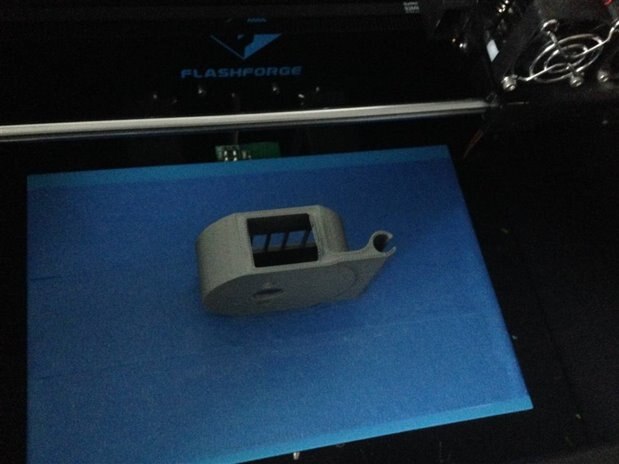
3D print the servo holder- for this print you don't need to have your supports on, as part of the slicing program |
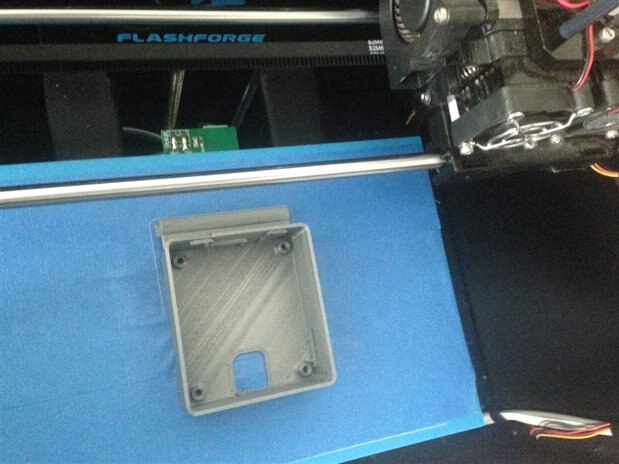
3D print the Raspberry Pi A+ holder - here ensure that you have supports turned on as part of the Slicer |
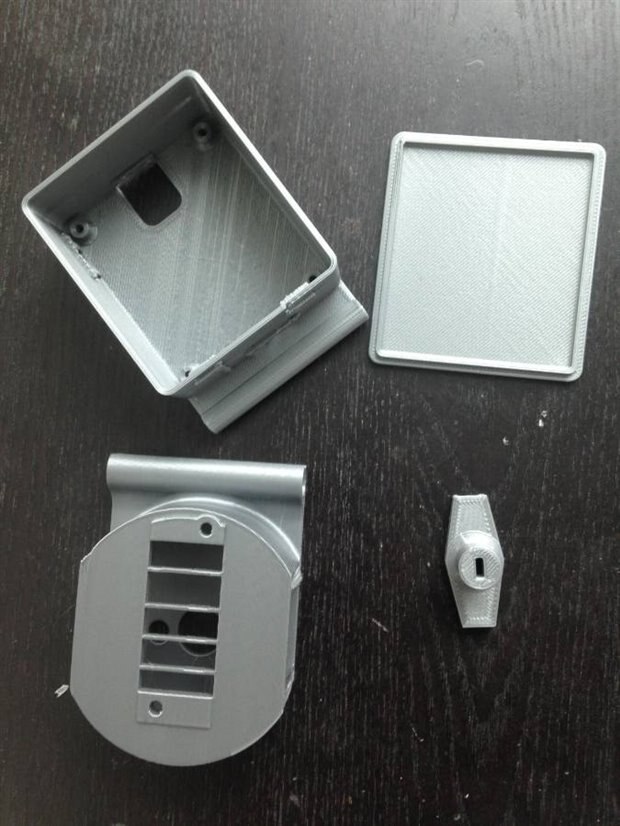
All the 3D printed parts, that is the Pi A plus Base Holder + Pi holder lid + servo holder + the servo horn attachment |
Removing the existing door locking mechanism |
Screw the 3D printed servo holder with the screws from the old door mechanism |
Add the servo horn to the 3D printed part, it should snap fit, but also add glue to secure it to the 3D printed part.. |
Add the servo and the Pi A+ to the 3D printed parts,and also add some hot glue over the screws used to attach the servo.. |
Move the circuit to Mini breadboard and add the lid, which should snap to the base. |
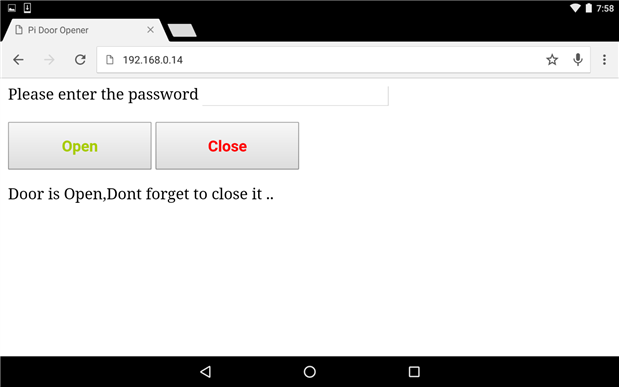
Screenshot of the python-flask web app. |





Link to the servo motor used - Standard Servo Motor (4.4KG*CM) and here is the link to mini breadboard which fits nicely in the Pi A+ enclosure.In addition as part of the setup , as you see in the pictures above I am using a 4AA batteries to drive the servo, but as part of the final setup I plan to use a USB cable cut at one end.
Here are the slicer setting I used on my Flashforge creator pro, in my case I am using normal PLA , but a suggestion would be to use PLA + (unfortunately I just have a couple of meters of red PLA+ left  )
)
Layer height - 0.3 mm
Infill density - 20%
Temperature - 205 C
For the steps for setup the flask web app, the code and the circuit details,refer to previous blog post
