


Introduction
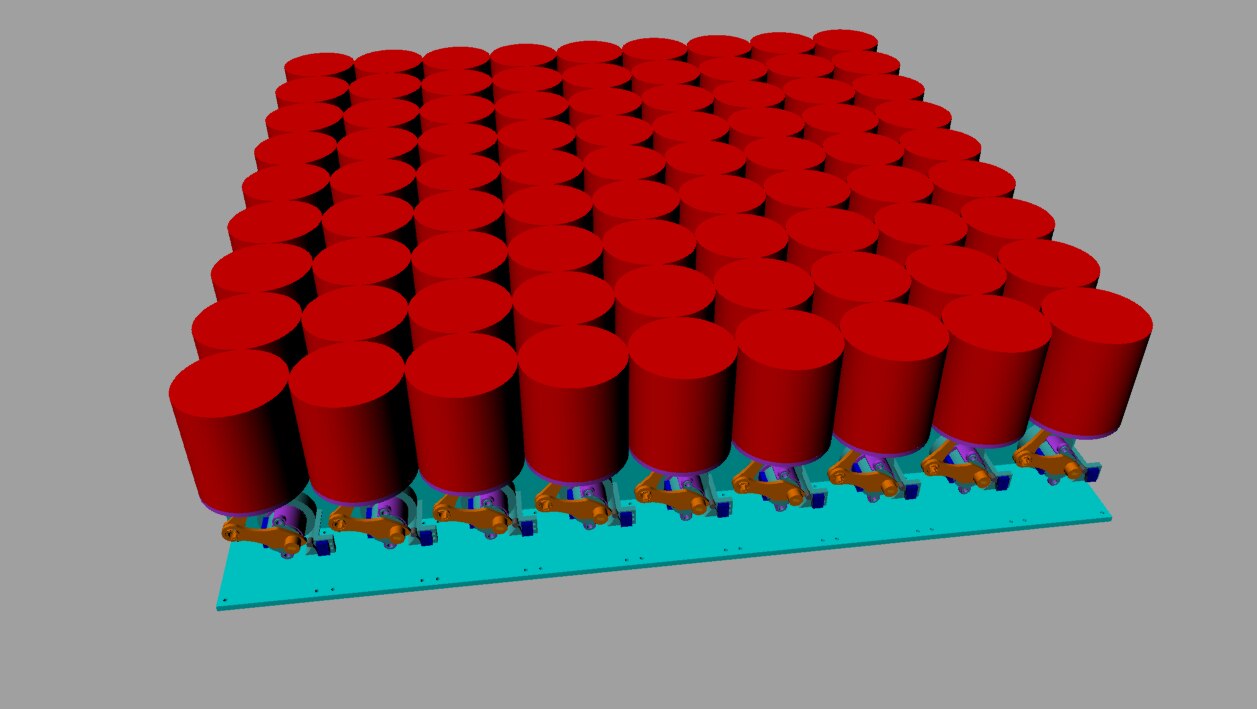
Dynamic surface is another moving subproject part of the PiIot design. It represents an independent moving platform: as well as the PiSense HATPiSense HAT includes an 8x8 RGB LED matrix the Dynamic surface is a physical 8x8 matrix built with big moving pixels. The video below shows a rendered simulation of the assembly design an example of a modular Dynamic Surface built with an asset of 81 modules.
Design of the parts

As shown above the moving pixel is built of ten pieces to build a m-Pix. A single m-Pix should be self-contained to be assembled in a matrix platform without empty spaces creating the floating surface effect. The rendering of the matrix simulation is shown in the image below.
Design requisites
Every module should adhere to the following requisites:
- Self-contained: Modules should be placed side by side in rows so the mechanics and the motors should be not greater than the m-Pix diameter (8 centimetres)
- LIghtweight: The moving cylinder should be as light as possible to reduce the effort on the motor and the global weight of the structure
- Compact and robust: This is mostly a problem of the right choice of the 3D printing structure as the influencing parameter if the solid fill percentage
- Easy to wire: The modules should make easy the motors wiring row by row, column by column
- Easy to assemble: The module parts should be easy to assemble also when a considerable number of units will be used
- Self-positioning: Every module should have a end-stop switch to identify the lower point when the platform is powered or reset.
Designing the assembly sequence
As I wrote many other times before in my opinion the most important step when creating a 3D printer object is the design. I mean that - especially when moving parts are involved - it is in the design phase that we may create the right solution always considering limits and advantages of the 3D printer technology. The sequence of images below shows the simulation of the parts concurring to make the entire m-Pix module:

Image above: the motor and the base support (here in the horizontal view) act on the cylinder while the stabilisation support is internal: this saves a lot of space but grant a good stability to the moving element.



Above images: Making the moving cylinder in three separate parts saved a lot of time making the things easier. With the stabilisation support built-in the moving component, the cylinder will be the largest element in the module. That is just what we want.
The linear motion transducer
Another important part of the design is how we convert the stepper motor rotation to linear movement:




As shown in the exploded rendering above the adopted solution is a lever system working as a camshaft. Due the reduced space and the low power her we are using a geared stepper motor that has the disadvantage to move relatively slow than the traditional more powerful steppers. Indeed there are many advantages adopting these devices: reduced size, low power consumption, good Kg/cm rotational force (thanks to the geared engine) and a good positioning precision. For our solution we don't need strong force but the movement should be fluid and a bit higher than the max rotation speed of the motor shaft. This is the reason that the use of the camshaft-like lever multiply a bit the speed conversion.
Providing an easy wiring method


Look at the images above. The rendered matrix simulation of some rows of modules shows how the motors wires can be connected to the respective motor controllers. The controllers and the PSoC 4200 array can easily fit on one side of the assembled platform.
The modular matrix can be replicated in multiple ones connected together without difficulty. Now we are ready to make the first prototype to see it in the reality!
Top Comments