


Introduction

I am not sure if the Dynamic Surface is an Animatronics or something related to Robotics. By a certain point of view it is a sort of modular robotic pixel reacting to some kind of inputs in certain conditions. By another point of view it is a modular animatronics, an object - memory of the famous Warhol's tomato sauce can - changing its height smoothly and precisely. Indeed an animatronics is considered a robotic device who mimics human gestures, a puppet, a moving object(s) built with elements usually static or created for different usages.
From Wikipedia the definition of animatronic is:
Animatronics refers to the use of robotic devices to emulate a human or an animal, or bring lifelike characteristics to an otherwise inanimate object.
So, what is the Dynamic Surface?
The Dynamic Surface is a series of modular, physical pixels - named m-Pix - assembled together in rows or matrices creating flexible and reactive surfaces. Due its modular architecture involving both the hardware construction and the electronics there are virtually no limits to expand this device that can be easily controlled by a small SBC like the Raspberry PIRaspberry PI.
But...
We can also think to this compound structure as a Robotics POP modular dimensional display.
The design details and simulation are described in PiIoT - The perfect reading place #19 [tech]: Dynamic surface, design and simulation
Credits
I should mention the MuZIEum that has partnered this project. The Dynamic Surface will be installed together with the other parts of this Internet of Things project inside the MuZIEum site to be available and playable by the visitors starting from the first days of next December 2016; with a special thank to the project manager Carlijn Nijhof. She trusted in the idea when it is was just an idea, also very difficult to explain.
Another great thank to GearBest.com that together with the main sponsor Element14 has contributed to the project providing the 100 stepper motors and controllers needed by the entire project.
I can't forget to mention shabaz that suggested how to fix the levers to the motor: with hot air. This simple tip has saved me a lot of time and revealed a stable and reliable solution.
A note on the Dynamics Surface modules (64 modules)
This m-Pix prototype will be used to develop the software. The Dynamic Surface 64 modules will be produced along the next month of September as the final characteristics, surface, color and container will be discussed with the MuZIEum staff to integrate the components accordingly with the site style, colors and environment.
We should take in account that the project should be constrained by some important parameters: the Dynamics Surface will be presented to the visitors also by visually impaired personnel. The main goal is demonstrating how the non-visual perception can be enhanced and improved by the IoT technologies. Alternative user interface methodologies can change and empower the approach between humans and digital machines.
3D printing the parts
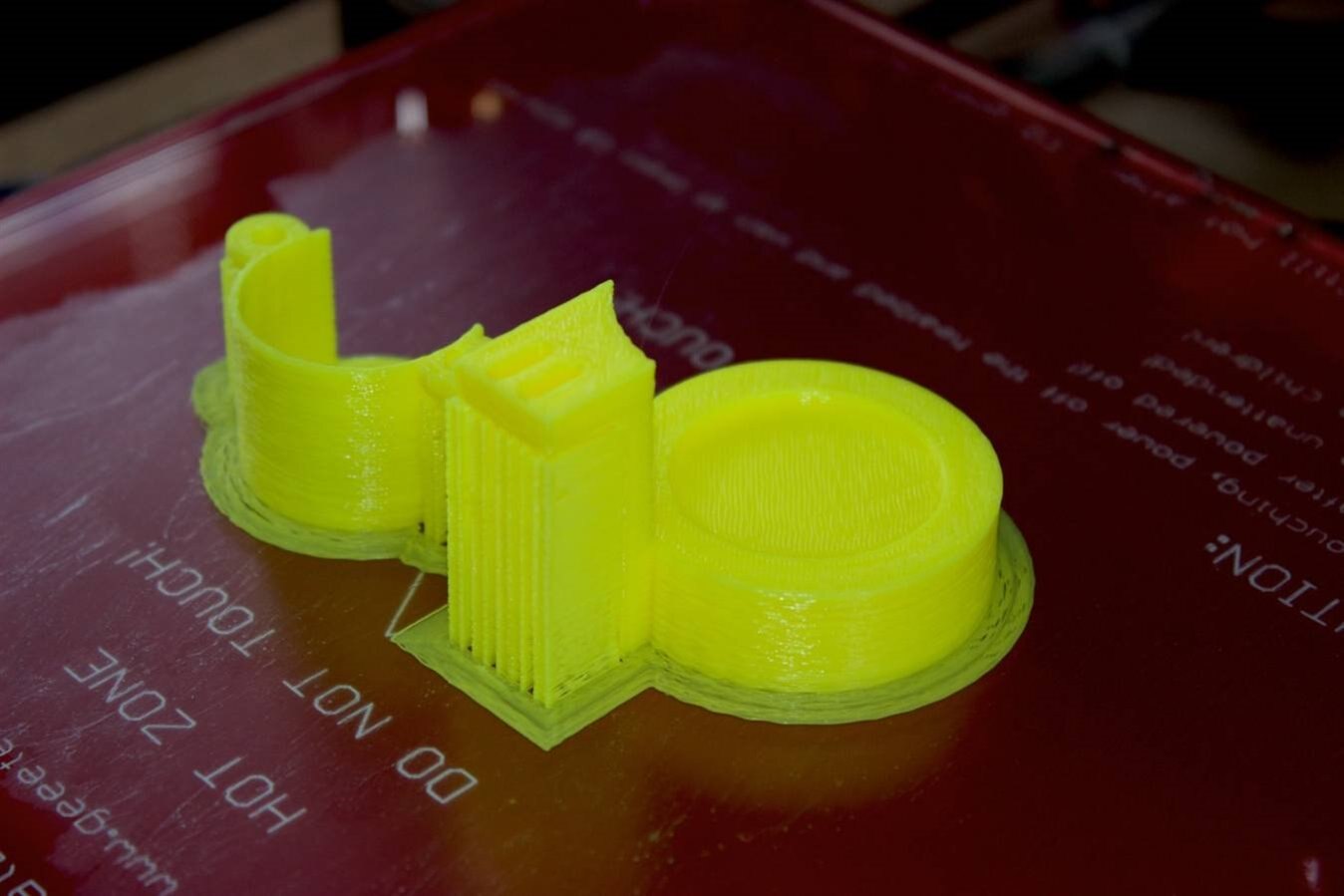
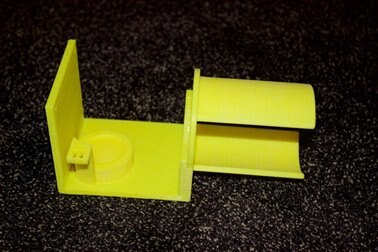
A full m-Pix structure is compound of 10 parts.
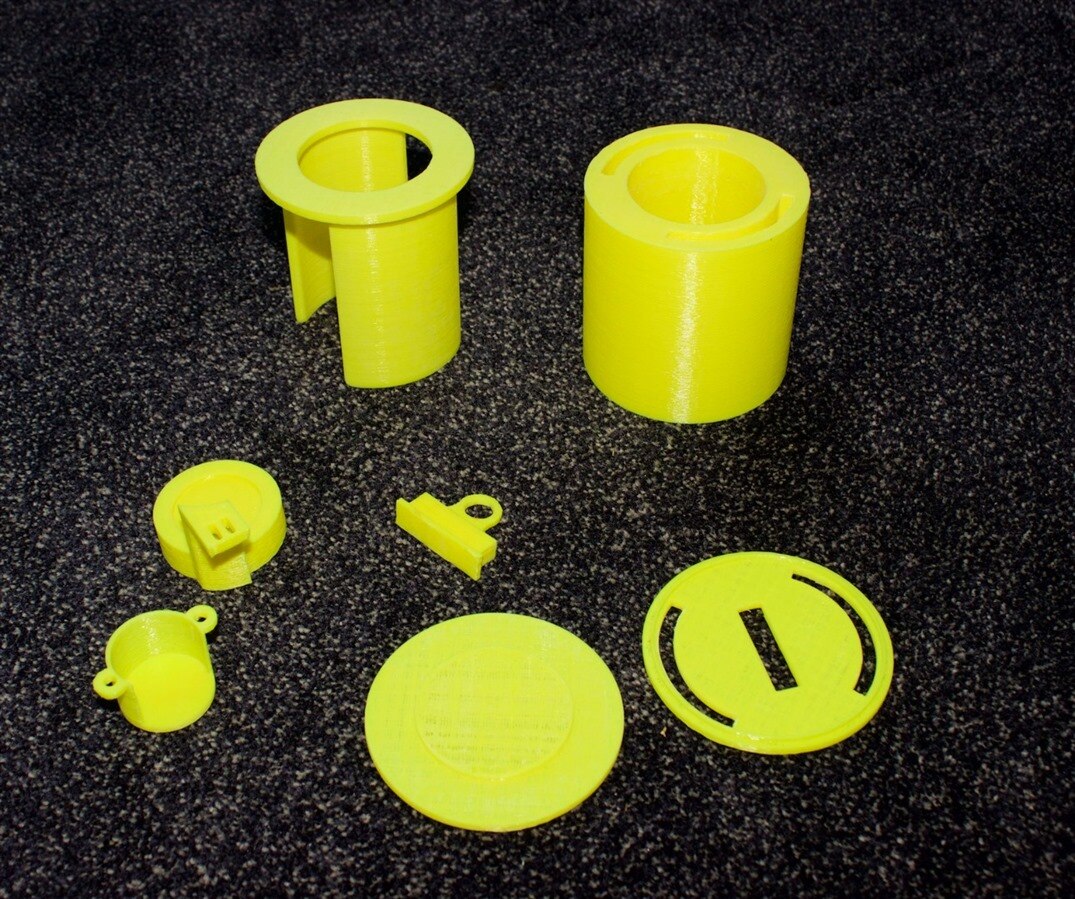
The above image shows seven finished elements: the three parts of the moving cylinder, the support and the motor and levers holder. Below we see in detail the printing process of these parts.
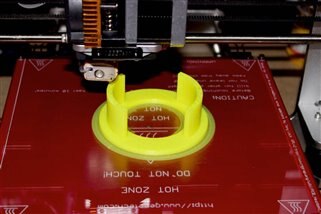
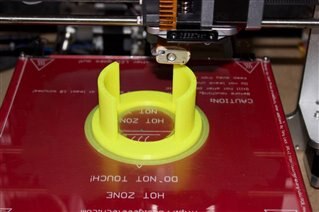
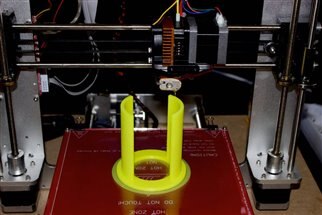
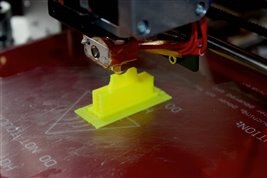
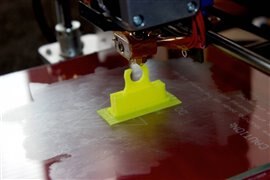
The cylinder and the levers joint
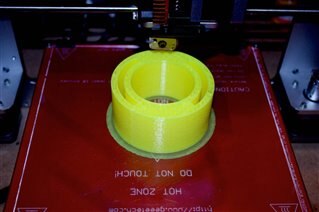
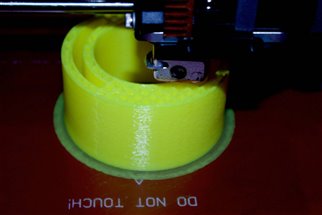

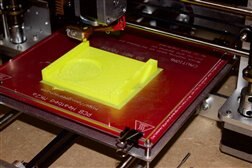
The images above shows four moments while printing the top, bottom and central part of the moving cylinder. These parts should be lightweight and are not subject to particular mechanical stress; to reduce the printing time and the weight these three parts are only 20% filled with 0.6 mm to the external skin thickness. It is sufficient to refine the surface after printing without consuming too material.
The choice to make the cylinder in three parts simplifies the assembly with a more flexible 3D printing strategy.

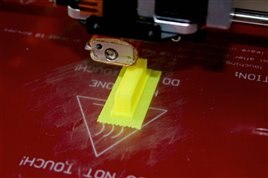
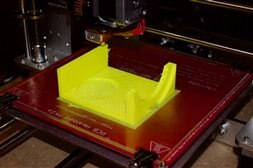
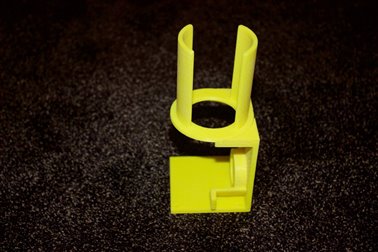
The above sequence shows four steps of the 3D printing of the support. This part act as a guide for the moving cylinder and fit inside it; this made possible to use few material - always 20% filled - but granting a good positioning of the part: the cylinder moves vertically and avoid rotating without generating friction.
Above the levers joint. is a small piece but it should connect the motion levers; it is 3D printed with 100% fill and is glued internally to the bottom cover of the cylinder.
The motor support
The 3D printer motor support - including the end-stop switch support - is built in two parts. The reason is the same: speedup the 3D printing time with lower filling but making a robust component.
The base of the support (the rightmost in the above image) is almost large and includes the switch support. The motor holder is kept separate and will be glued over the other inside the engraved area. This gives a perfect positioning and the option to rotate the holder for last minute adjustments.
These parts are 3D printed with a 30% filling.
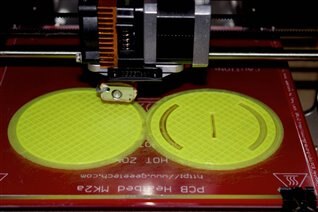
The m-Pix base
This is the main structure support that will hold the motor and the moving parts.
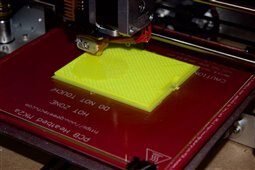
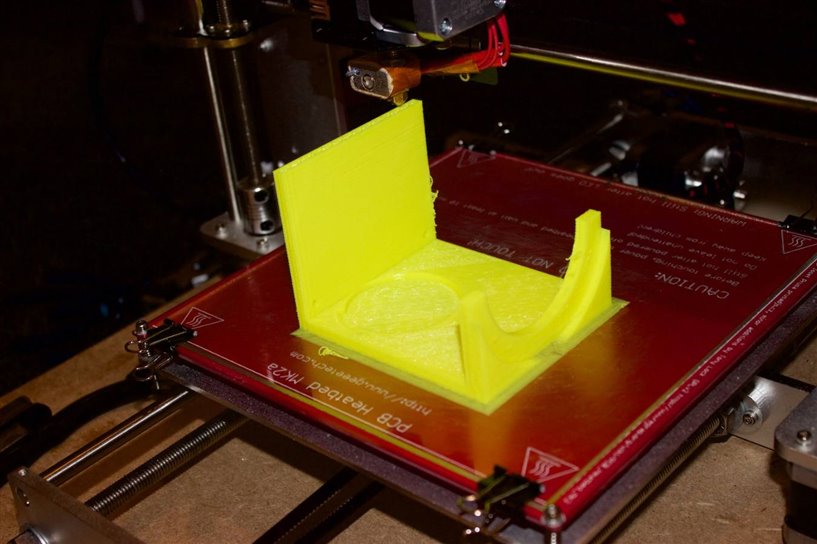
As shown in the 3D printing sequence above also in this case the printing fill density is only 25%. Adopting a solution with the motor supports glued in the engraved area visible in the fourth image the movement forces impact on the structure in a direction aligned with the filling support. Indeed the base is almost flexible to compensate some unexpected mechanical stress when many modules are assembled together.
Assembling the components

Using a special product perfect for the PLA and PVC the parts are glued together. The first step is assembling the bottom of the cylinder with the lever joint: should be glued internally then the cylinder can be closed with the top and bottom parts.


The images above show the cylinder bottom cover with the joint glued. Note that the cover has a relief circle to keep it in position with the cylinder body.
Now the cylinder can be closed with the top cover as shown in the images below.



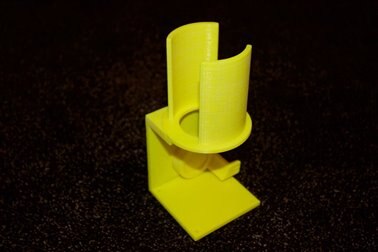
The next step is to glue the base with the motor support and the cylinder guide.

Assembling levers and motor
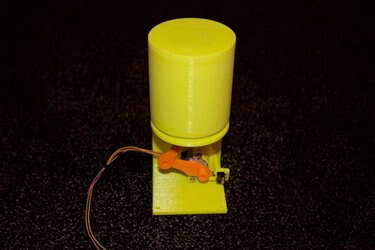
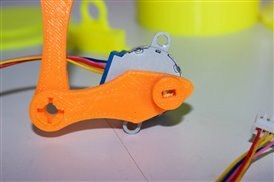
Every module uses a 28BYJ-48 geared stepper motor controlled by a LM298 based motor controller. The controller will be wired externally from the m-Pix while the motor is fixed in the motor support glued to the base. In addition a ultra subminiature micro switch by Omron is used as end-stop for self-position the m-Pix to the lower point. The datasheets of the components are attached below. The images below shows the motor and the linear motion transducer levers. The prototype is complete and all the parts works correctly. The next step will be controlling the movement.


About the levers motion transducer
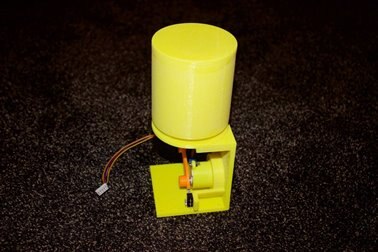
The detail images below show the geared stepper motor connected to the transducer levers acting like a camshaft. Thank to shabaz suggestion the easiest way to fix the first lever to the motor shaft was to 3D print the collector about 0.25mm smaller then fit it inside with hot air. The motion has no impact on the lever locking as the motor shaft impress a torsion to the component and it remain in place without risk.


| 28BYJ-48.pdf | |
| MicroSwitch.pdf | |
| L298_H_Bridge.pdf | |
| L298N Dual H-Bridge Motor Controller - All.pdf |




Top Comments