


Reminder
The mechanic design and many of the motion solutions adopted and experimented in this part of the project will be reused creating the Dynamic Surface as mentioned in PiIoT - The perfect reading place #5 [doc]: Architecture and design
About the moving parts
To increase the perception of the image a flat design should be transformed in a solid object where some image elements (hairs, eyes, lips, nose) react to the human interaction: hairs, nose, lips and eyes extrude at different heights with an excursion of 5-10mm. To reach this goal the back side of the Art-a-tronic will include motors, motor controllers and a micro controller activating the animation when a presence is detected nearby the opera through an ultrasonic sensor and touch enabling via cap sensing some areas nearby the installation.
Hardware components
The moving mechanism is conditioned by the adopted hardware. The parts involved in this model will be the following:
Cypress CY8CKIT-049-42XX
The micro controller will manage the stepper motors as a direct feedback from an ultrasonic sensor.
As the Art-a-tronic is a IoT node it will interact with the enOcean wireless network.

5V geared micro stepper motor provided by GearBest

Stepper motor controller based on L298 provided by GearBest
Making the parts moving
The 3D design of the moving parts has been created by steps explained below with a series of rendered images. The final Art-a-tronic is moved by seven stepper motors.
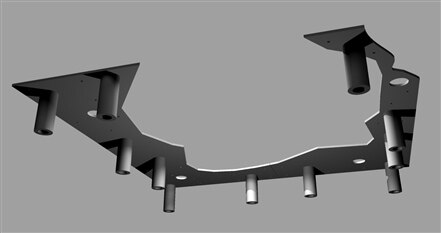
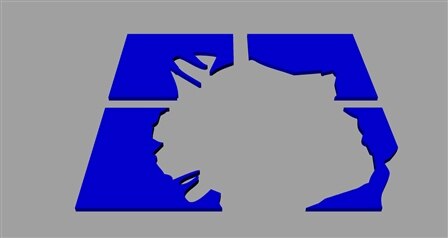
Building the base
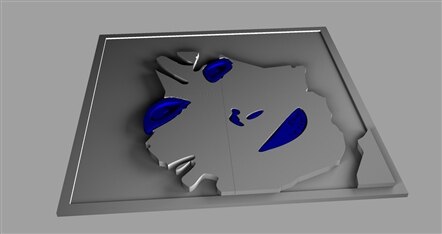
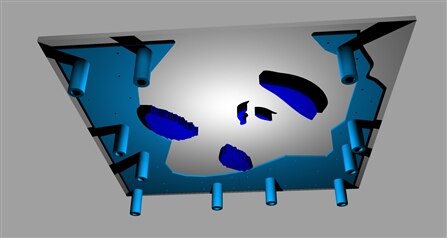
The white base covers two roles: it is the visible support of the Art-a-tronic including the fixed parts (the white background n the flat image). When in standby the moving blue components should appear at the same level so the white visible parts are extruded.
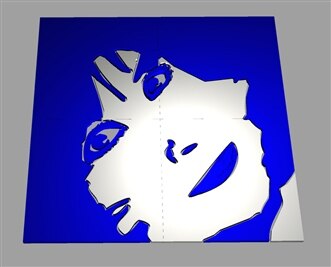
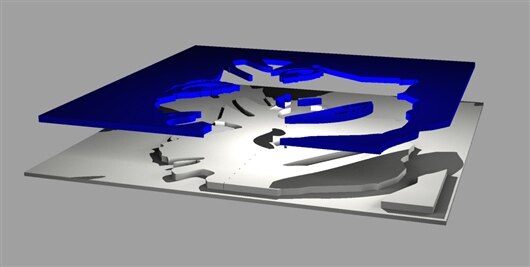
As shown in the above images the base (white) contour has been reduced a while to permit the up-down (blue) movement.
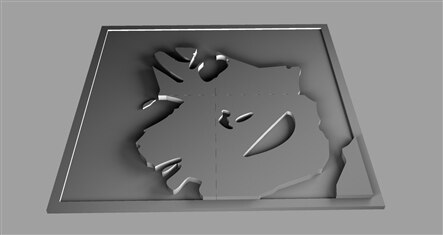
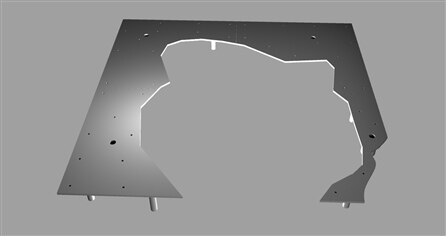
The base is also the support of the entire structure; an external border is provided to make a frame helping to assemble the four parts in a single solid element. To slide vertically the moving objects we should include a support plane moved from the bottom by the stepper motors. This requires and extra 2mm engraving in the base (white) to host the support surface.
The images below shows the rendered base model.
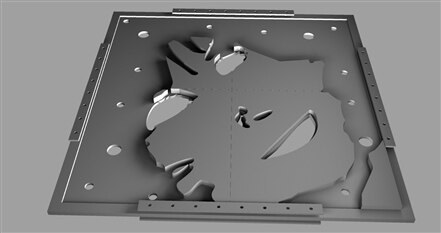
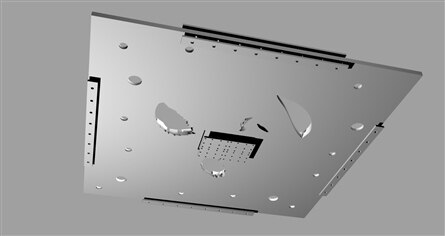
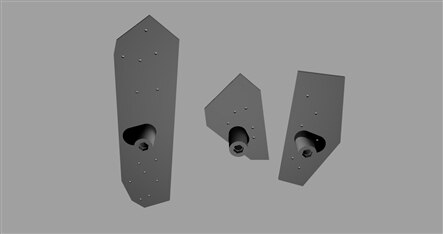
Supporting the moving parts
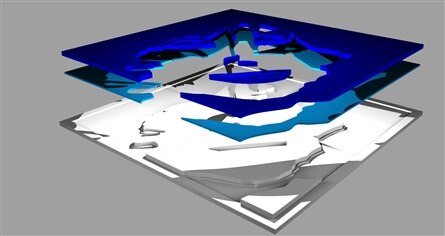
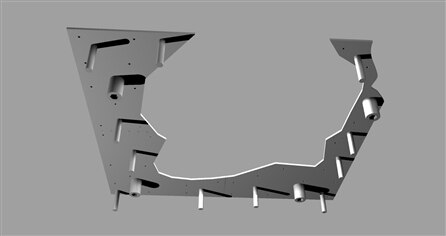
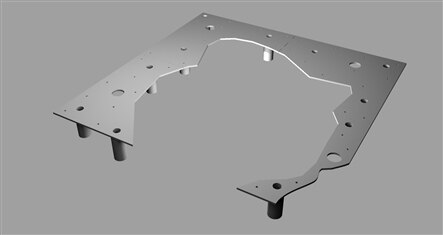
When the moving elements (blue) are pushed up outside the base should be kept in place. The top moving components are assembled over their respective top supports hosting the motor screwed shaft and three stabilisation pins for every element. The base is enforced by a bottom support including a hole for every motor shaft and three pipe-guides for the stabilisation pins.
Top and bottom pre-assembled rendering
Top and bottom rendering of the top supports
Top and bottom rendering of the bottom supports
Adding the assembly elements
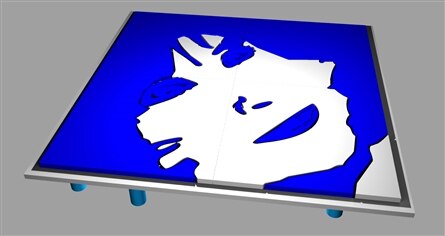
Due the 3D printer limits - the max printable area is few less than 200x200 mm - every part is built with four separate elements. Thus we should add extra-components to keep together the final structure.
Two supports (top and bottom) has been added to every side of the frame and a rectangular support complete the final building to the bottom center of the ideal cross separating the four sectors.
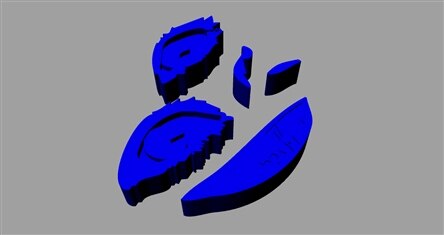
Moving eyes, nose and lips
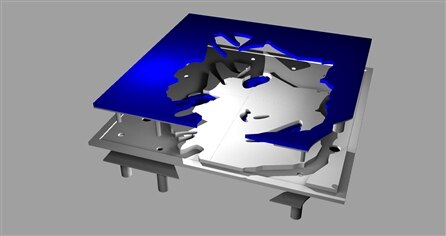
The four parts of the (blue) hairs lays on the (white) base but the remaining three parts (requiring other three motors) follows the opposite logic: eyes, nose and lips are pushed from the bottom emerging from the base holes. These parts are self-guided inside the base.
In the eyes, nose and lips the top supports have been removed so the components height includes the thickness of the base layer.
Ready for printing
The images below shows all the 3D printable parts of the first 3d designed prototype, top and bottom view.
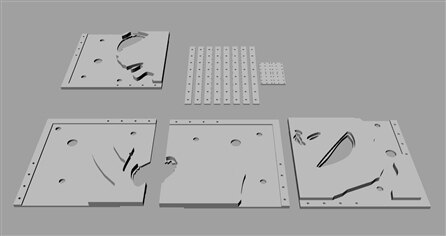
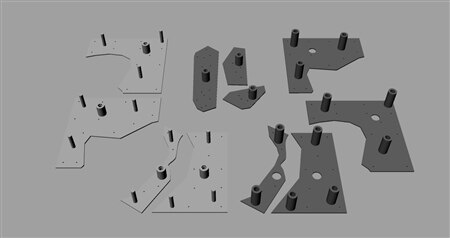
It is needed to complete the assembly of a first set of components to complete the motors and electronic parts setup.
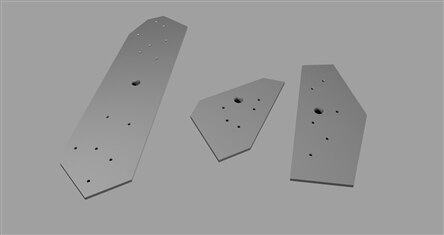
3D print test and minor issues
A first group of test parts has been printed and things sounds good. Some minor issues will require small changes then the final parts can be finally created:
- Include a small support area to the top and bottom supports for better stability
- Increase the support pins diameter for more robustness
- Remove the support holes. The parts will be assembled with super-strong PVC and PLA glue already tested for reliability. This will significantly reduce the weight of the moving parts.
- Replace the M4 nut for the screwed motors shaft with a tubular M4 support
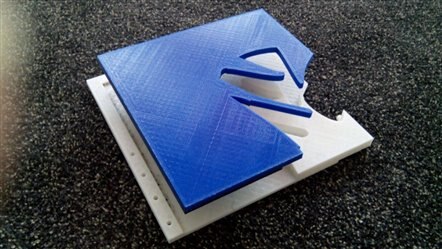
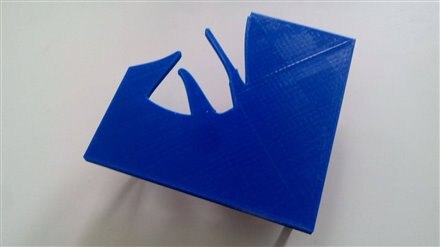
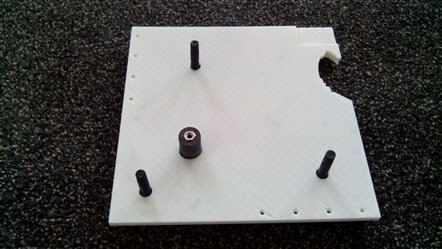
The following images shows the 3D printed parts used for testing

Top Comments
-

balearicdynamics
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

balearicdynamics
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children