


So unfortunately i didn't make a post last week. While i was trying to get the parts printed i started having some problems with the 3D printer I was using. During the print layers would start offsetting as the print got further. The following image is the best print i could produce after this issue occurred 

I tried quite a few things but couldn't seem to overcome this problem. I eventually tried to update the firmware, this lead to more problems as the new firmware wouldn't install. At this point i decided i would be better off trying to make the arm the old fashioned way. This weeks post is the progress i have made so far.
I started off with a planning session on how to build the arm. All of my drawings are scribbles on paper so I am omitting them from this post (hopefully next week i will have a chance to produce some better diagrams to upload for the rest of the arm).
An overview of the base is as follows:
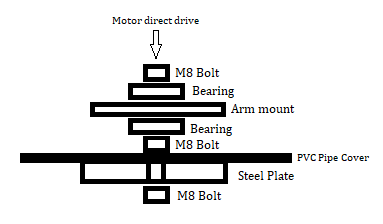
The M8 bolts only make contact with the inside of the bearings and I planned to drill the plate with a 12mm hole so that it will only make contact with the outside of the bearings. The motor would be mounted to the plate marked as the arm mount. For the base of the arm i decided to use a 125mm PVC pipe cap as that would be strong and it saved me from making something similar from scratch. To add some weight to it I attached a steel plate on the underside of the cap, this can be seen in the following image.
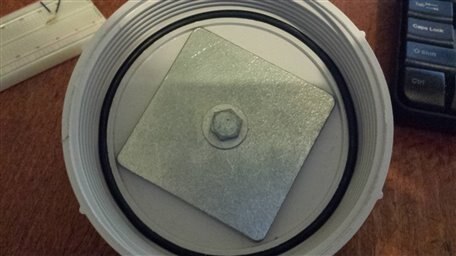
As I mentioned previously I had some bearings which i bought for the 3D printed arm which I originally planned to make. It was fairly easy to mount them as described in the diagram above, the following images show my questionable work making a bearing sandwich:


The bolts coming out of the top of the plate are for mounting the servo motor which will rotate the arm. The full setup can be seen with the mounted motor in this youtube video.. I was simply running the motor using an interactive python session 
Hopefully next week i can make significant progress in producing the rest of the arm.
Top Comments
-

genebren
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

genebren
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children