


Do you even lift bro?
Well it turns out i don't, or more so my robot arm doesn't. I originally calculated the total torque requirement for the motors I was using when running at 6V. I hadn't purchased a power supply previously and did my initial testing using a AA battery pack. I got hold of a 5V 3A power supply from a friend and decided to use that in my build. As it turns out my servos don't provide enough torque to lift the pepper grinder. To overcome this Ii plan to switch my build to use 12V 5A power supply with the motors in series. When the servos are running at 5V they provide 9.8kg/cm of toque and when running at 6V they provide 11 kg/cm. Though the difference is small the arm was very close to providing enough torque
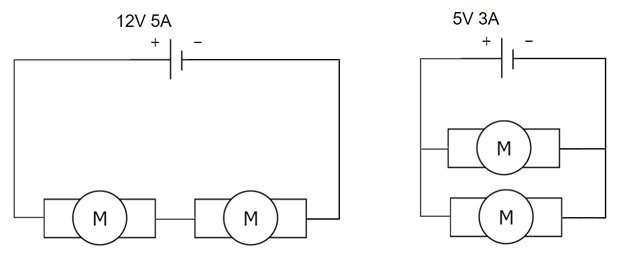
The stall current of the servos i am using is 2.5A, this means that the motor will draw up to 2.5A before stalling. Under the original design (motors in parallel) this would have meant that each motor would not have had sufficient current.
I also aim to reduce the weight of the grinder by removing some of the housing at the bottom of the grinder. Though this wont save a lot of weight it should bring the grinder arm combo under the maximum weight.
The major task i did this week was to build the frame for attaching the grinder to the robot arm. I built this using more of the aluminium plate and brackets i used for the other components. The design I planned to use is outlined below (All of the parts would be attached by bolts):
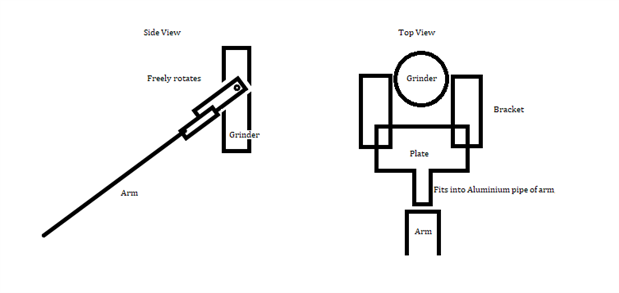
The final result doesn't look very tidy but it works (which is a good start).

Top Comments
-

DAB
-
Cancel
-
Vote Up
+4
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

crackedpepper
in reply to DAB
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

crackedpepper
in reply to DAB
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children