


So last week i posted about producing the base for the arm which would provide the rotation. I had intended to make the rest of the arm this week but i have only managed to make a single joint. My original plan for the first joint is as follows:
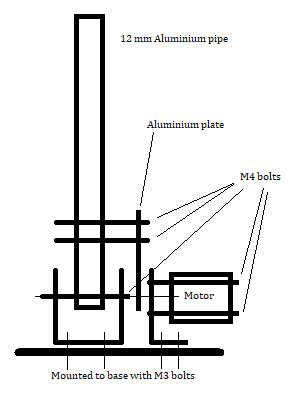
I followed this design closely and managed to build a functional arm. The only major item omitted from the diagram is that the drive plate for the arm is held in place by bolts on each side. The final configuration can be seen in the following diagram:
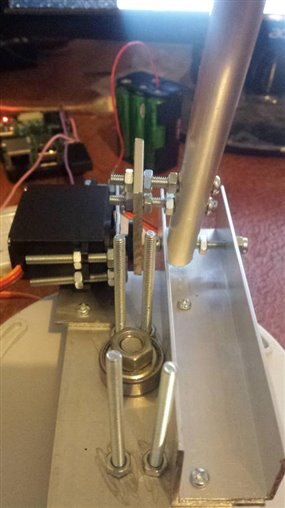
As i don't have a very good set of tools the tolerance of the parts was less than desirable. I did however manage to end up with a working arm (joint). The biggest problem i had manufacturing this was that i don't have a brace or drill press, so drilling holes at right angles was quite a challenge. Most of the holes ended up being slightly off square. While the arm still works I'm not thrilled with the tolerances. Another problem i didn't consider when designing this joint was how difficult it would be to put together.
In order to put this joint together i need to join each part in a specific order:
- Join the motor mount to the base plate.
- Join the motor to its mount.
- Join the arm (pipe) to its mount.
- Attach the drive plate to the connecting bolts (connecting to the arm).
- Attach the arm mount to the base.
- Attach the arms drive plate to the motor.
While this worked fine it did mean that making changes took longer than i had hoped for. At first i joined the gear for the motor with some strong glue, but i tested it before it had fully set  . It broke the join due to the shear force, but after re gluing the part and waiting 24 hours i seem to have a working join:
. It broke the join due to the shear force, but after re gluing the part and waiting 24 hours i seem to have a working join:
I'm pretty happy with how this is working but as the challenges end date is fast approaching I think I may have to stick with this current build as the complete robot arm. I still need to tidy up the mounting bracket for the arm as it currently obstructs the motor for rotation and reduces the movement of the arm to a horizontal position. Also as the motor for rotation will obstruct the movement of the arm i will have to move the arm primarily away from the base, this will require me to add additional weight to the base to avoid tipping over.
I still need to finalise quite a few things before the this project is complete, I need to buy a separate relay for switching the pepper grinder on and off. I also need to finalise how i am going to run the servo motors as during testing i have been running them off of a battery pack. Finally am also really keen to dabble in the computer vision, which i originally added as an extension to the project so the next couple of weeks are likely to be quite busy.
Top Comments
-

aspork42
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

aspork42
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children