


Introduction
I have a habit of biting off more than I can chew and this design Challenge will be no different. Bear with me as I explain the basics of my project. My complete proposal is a 'bit' longer than this particular post and I will be explaining my evil plan for project virus here. Lets go!
Cool Project Name:
VIRUS (Voice & gesture Instructed Robots & control of Universal Systems)
Abstract
My proposal is conceptualized atop the fusion of JARVIS from IronMan which is a voice Home Automation System and the Minority Reports gesture Control System, merged with robots such as R2D2, C3PO(StarWars), Rosie(Jetsons), Wall-E(duh!) and possibly leverage the power of IoT by offloading Computational components to the cloud like SkyNet(Terminator). The idea is to create a reconfigurable robot that can be "Transformed" into the above mentioned and can link up to a central computer.
Detailed Proposal
Robots are part of every science fiction movie, comic and novel and they are designed in a multitude of ways to simplify tasks in our world. The design of such robots is already taking place like the Roomba, Redhawk and many more. The problem is that these are designed for a specific function which causes consumer to wonder about their "value proposal". Cleaning, cooking and serving are some of the basic chores in a house. The bigger the house, the larger the tasks and with time being something that we all fall short of, we need help. Additionally, our homes are becoming smart homes and facilitate quicker and more automated lifestyles. I will go straight to the Project Design.
Each module is explained in brief in the proceeding sections. The overall diagram of the system is shown below and as a requisite of the challenge, their inspiration is also mentioned.
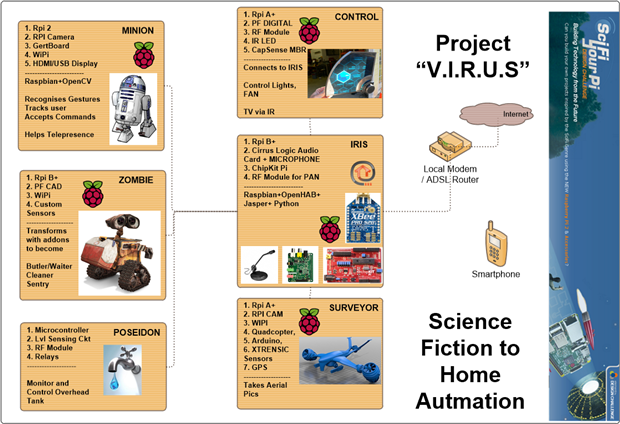
The most important thing about this design is the design and use of "Transformer" Robot which can be modified to perform a multitude of tasks. In the proceeding sub-sections I will explain the sub modules to be made, their design and what problems they solve.
The Central Controller - IRIS
Inspiration - JARVIS from the Movie Iron Man Series and SKYNET from Terminator Series
Description: The name IRIS was used for the computer in the Sci Fi Cartoon Series Johnny Quest and it will serve me here as well. The idea is to have a central computer that can act like the controller and data accumulation point for the entire home. It will sit in my home office/workshop and will accept voice commands via the CIRRUS LOGIC AUDIO CARD which will be processed via Jasper(JARVIS). It will also run OpenHAB which will be used to issue commands to the various sub-modules and robots(SKYNET). The CHIPKIT PI will act as a layer of abstraction between the RPI and the RF Interface which is used to create a PAN. If the need arises, the RF modules can be upgraded and other means of communications can be introduced such as two wire etc and the CHIPKIT can be programmed to accommodate that functionality as well as offload the network management tasks.
It will perform functions of data collection, sending commands, alarm, light, robot etc control as well as voice enabling the office.
Assistant/Telepresence Robot - MINION
Inspiration: GLADoS From Portal, R2D2 from Star Wars, Minions from Despicable Me, Minority reports Gesture Recognition
Description: A robot that can see. Using a RPI2 and image processing, this robot is able to interpret gestures and can relay this information to the Central Controller. It can track a user in a particular area and even follow them. It will be powered by a RPi2 and equipped with a RPI CAM and images will be processed via OpenCV. This data is transmitted via WiFi using the WiPi Module. In order to facilitate movement, the GertBoard will be used and a new chassis will be created around it. Additionally, a display will be attached to enable telepresence capabilities.
Service/Cleaning Robot - ZOMBIE

Inspiration: Wall-E, Rosie from the Jetsons
Description: In order to perform regular tasks, a reduced robot is required. This robot can be transformed as per requirement. The basis is a chassis, motors and driver which are just the right size. It can perform regular tasks such as serving dinner, cleaning the driveway and acting like a sentry. It is designed to have a base with a RPi B+, WiPi, PiFACE CAD(for task selection) and some sensors for following predefined paths. Line follower robots are a good example and this will use a similar marker system to navigate way-points. As a service robot, it can toggle between two waypoints of the dining table and the kitchen. Same for when it must act like a sentry robot. Fluid sensor on the bottom can detect spills and leaks. And as a Cleaning robot, a zig-Zag way point system will be used to push leaves in the driveway.
Room Panel Module - CONTROL
Inspiration: Wall panel from Iron Man
Description: In order to complete the home automation experience, I need to have an addon that can connect my Central Controller to the wall socket from where everything is conventionally controlled. This module does that. It consists of a RPi A+ based system which connects to our central controller over ethernet. It uses the PiFace DIGITAL to control power appliances that are present on the wall switch panel. I will use the CapSense board from Cypress to replace mechanical buttons with touch buttons and add an IR Transmitter to control the TV and Air Conditioner in the room. Additionally there is a PIR Sensor that will enable the detection of movement in the room which will be used for the Alarm System Capabilities.
The Surveyor and Poseidon
TBD - Will explain these as they come to life. HINT. I am already working on these! 
Project Planning
I am NOT planning a lot of things in this challenge as doing that makes it a chore. I like making things and I will follow that route to build these modules and have as much fun as possible. In this process and time of three months I will try and produce some tutorials so that "You watching at home can follow along".  The design is meant to be Useful and Feasible as well as efficient and cost effective solutions to the given problems and I hope I am able to provide sufficient and clear documentation so that it can be replicated by other community members.
The design is meant to be Useful and Feasible as well as efficient and cost effective solutions to the given problems and I hope I am able to provide sufficient and clear documentation so that it can be replicated by other community members.
Lets get to it then!
Cheers,
IP
Top Comments
-

DAB
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children