


Well this project was a great challenge and I LOVE my new QuadCOP. I think I may rename it to DRIOD COP since I made the look akin to Star Wars droids.
I have posted some information that I will not repeat in this summary. A few post that I think are very important:
Some information from my original application
Explanation of the ControlSwitch
Challenges with the ChipKit Pi
Microstack GPS and how I used it
Rasberry Pi Turning on the camera
Autopilot Functionality I am Trying to Implement
Source Code and Software Flowcharts
My Favorite posts that are not as important but include my family:
You call that A QuadCopter? (see first video)
QuadCOP final construction pics
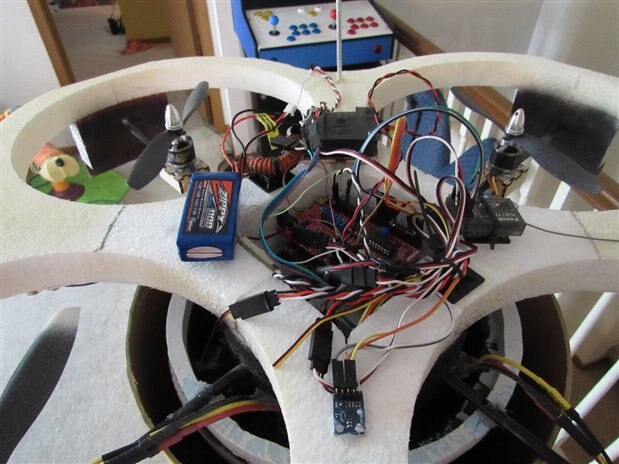
I want to provide a high level picture of the final hardware:

Here is the final walk around of all the hardware and elements I have used.
Parts Used from Kit:
- Pi 2
- Pi b+
- Raspberry Pi Cam
- ChipKit Pi
- Microstack GPS
- Xtrinsic Mems Board (still under testing)
- Pi Shim RTC
Things I added from original design:
- Custom Protocols
- Moving Head
- Use of ChipKit Pi instead of Arduino (huge learning curve)
- Custom built quad body (instead of buying one)
Things I didn't get done in original design:
- Sound Card
- Motion Sensor
- Sending of Text Messages (Logging is still done)
I have yet to test the waypoint navigation as I am out of time, but I will be testing that this weekend, I will add the video to this post. Currently what I am testing it the "loiter" functionality, that it the QuadCOP attempts to stay at a specific heading and GPS location.
I am new to this hobby and did not account for the huge learning curve with some of the systems. I also lost a month for a family vacation and wish I would of taken the project with me!
As a final fairwell I went out in high winds and did one last test of the loiter and also flew the quad around a bit. The winds were very high and I wanted to see how well the quad held. Unfortunately the camera cut out after 1 minute. This flight was CRAZY and the QuadCOP was trying hard to holds its place. I had to take control back a few times.
I attempted a very low loiter and the quad headed towards the ground. There was a puddle on the ground and I think it messed up the sonic sensor, and it hit the ground! You can see the puddles.

Since the head came off, it unplugged the RPi B and the camera, and the video didint record from inside the head. The repairs seem minor so I am going post more vid tomorrow with a 2nd retry.
Conclusion
Thanks Element 14 and EVERYONE for your help and support. I didn't get as much done as I wanted and my documentation is not as nice as I am capable of. But rest assured in future projects my abilities and quality will continue to rise!
This project allowed me to use C++, which seems to be a dying language in the everyday workplace. C++ is dear to my heart and thoroughly enjoyed coding the QuadCOP with a real language.
My family participated including holding things, getting tools, painting, and putting up with a grouchy dad! Time with family is never wasted and as such I am very satisfied with my project. I will continue it on forever as it will never be considered complete! I have an awesome new RC toy with unique functionality and I plan to fly this around at my club giving demos. It is a real show stopper!
Edit: What I feel I accomplished.
I read the point of the contest is to push the knowledge of the Raspberry Pi 2. I feel I did that by using wiringPi and I2C, block protocols, repeated starts, threading (Pi 2 has multiple cores) as well as sorting out the ChipKit Pi as a real time component to the Raspberry Pi. I showed how to realistically use the Chip Kit Pi do to do real tasks that may not be suitable for a Non Real-Time System such as the Pi2 with Raspbian.
I don't like that I didn't get all the functionality I wanted to completed. I do feel that I solved many issues and if someone wants to do real work with C++ and the Pi as an embedded system I have provided a strong foundation for doing that. I felt these things were more important than adding more eye candy or videos. Unfortunately the technical aspects do not get much attention, as is shown by my software flow charts and source code post. I hope that someone can use my knowledge I have shared.
A few parting pictures:








The Ketteh sez was a good project.

We all had fun!

Top Comments