


Previous Posts Here:
I was very nervous. I turned the loiter on for just a second and it held then started dropping, the ground sensor caught it.
Because my controls are being passed through the chipkit pi, there is some resolution lost so its a bit touchy for a hover..
A few messy pre flight pics, and the video. I am going out to get a better flight and test some more of the functionality. Today is a busy day.
Messy but secure. Covered up by the top head so who cares!

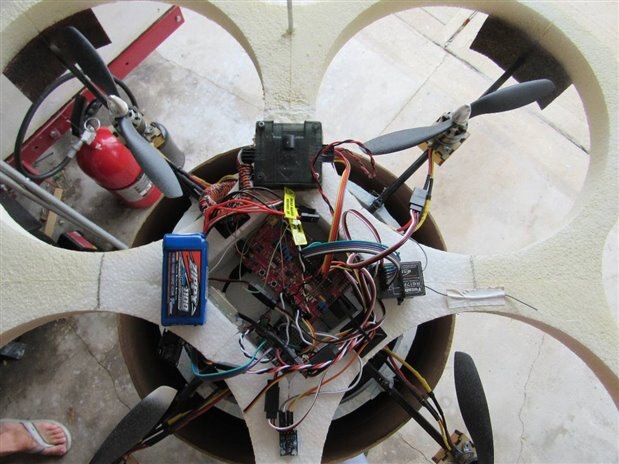
Ping sensors. Only 2 of 4 installed.

I need a haircut. And to comb my hair. And a bath. This project has taken control of my life!
I have to go fly more, no time to waste! The last few seconds of the vid is the loiter, I yelled STOP because I thought it would crash into the ground. It got very close but the triggers worked and it detected ground! WHEW
BTW the head is moving by itself as intended, I need to fix up the moving algorithm, its pretty plain.
Edit: A couple notes of how my version of loiter works. Typically loiter attempt to maintain heading, and to maintain a specific GPS coordinate all within some certain thresholds.
If a quad needs to move backwards, it can move backwards. But not my quad (yet). It will do a 180 degree turn and move forwards. Currently, all special corrections are done with forward movements. I gave my quad an advantage during testing in that I put the nose into the wind, meaning it may not have to turn around.
So its like a game of Asteroids where as the ship goes through the center of the pull, it does a 180 to face it. The nose always points into the center of the field.
This is just to make testing easier. Just like the heading wont do a 350 degree left rotation instead of a 10 degree right rotation, the same efficiency algorithm can be used to move without changing heading at all.
Top Comments
-

balearicdynamics
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

screamingtiger
in reply to balearicdynamics
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

screamingtiger
in reply to balearicdynamics
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children