


Previous Posts Here:
Later today I will be publishing my code and flow charts. One thing I am working on is getting an accurate heading from my magnometer. I have an open question out there for some help, I also have ordered a new sensor just in case. I expect by tomorrow to have it resolved.
However, In the interim its time to get this flying! Despite the fact my magnometer is wrong, it is still consistent. I cannot navigate to waypoints with incorrect heading information and the current readings I have do not adjust linearly to the correct heading. But I do know where north, south, east and west are and I can adjust my heading to those specific headings. What doesn't work is trying to get to NE, SE, SSW etc..
So, for testing here is the plan:
Go north for 20 feet, turn right, Go east for 20 feet, turn right, Go south for 20 feet etc...
So basically the QuadCOP is flying a square.
At the end of each 20 foot leg, the QuadCOP will perform a sensor scan, by having the flight system move the head 180 degrees. All of this will be automatic without any manual control!
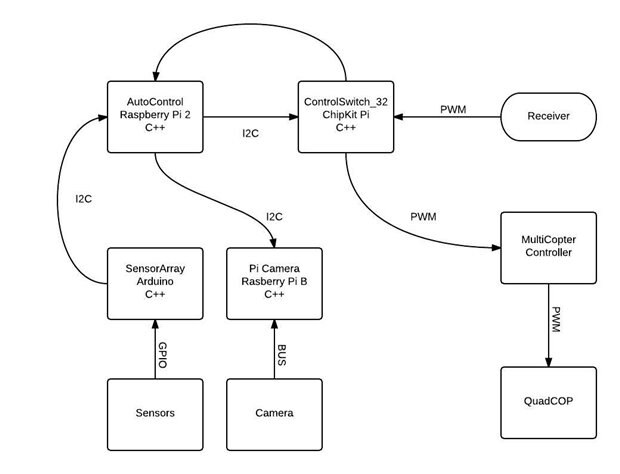
I feel this will give a good test of the Rasberry Pi Flight System (RPFS) and check the control switch (ChipKi Pi) functionality. The control switch is already working for manual control as it is relaying the PWM signals from the Rx to the flight controller.
A couple previous vids to show what I am talking about.
here is an explanation of the control switch:
Here is my first test of the control switch, which is reading the PWM from the RX and passing it to the flight controller:
For reference, here is the software and hardware flow, to be included again when I post the rest. Drill downs are needed for each system.
I will be flying this evening and posting a video.
WISH ME LUCK! Its time for this thing to Fly or DIE.
Top Comments
-

amgalbu
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

amgalbu
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children