


In my previous post I showed some photos of a frame made of steel wires. I found out this design to be absolutely faulty because it was not rigid enough to dampen vibration induces by motors and propellers.
So I started with a new frame frame made of U-shaped aluminum profiles. The final result is shown here
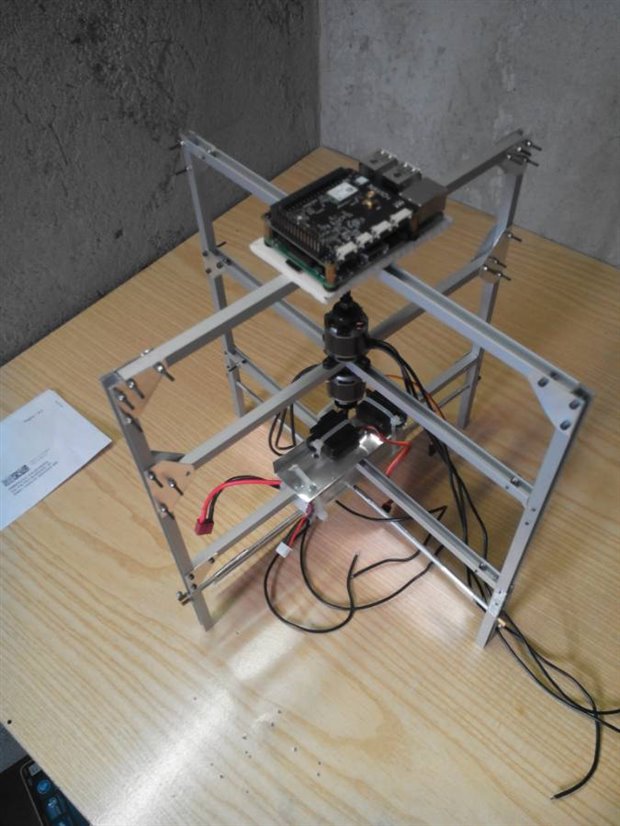
The U-shaped profiles are joined using 0.5 mm-thick aluminum sheet

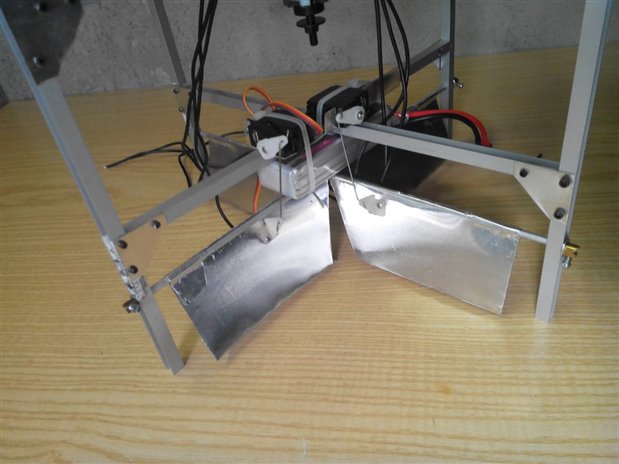
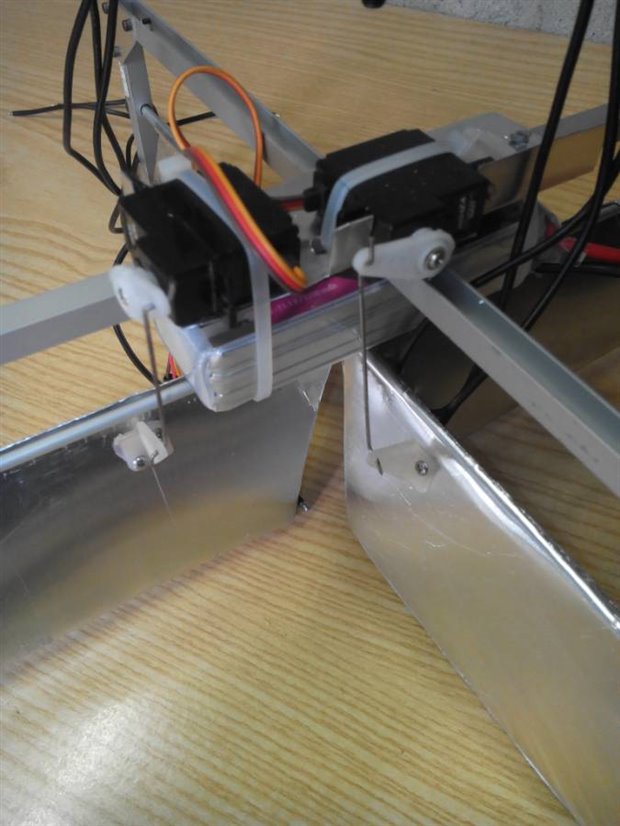
At the bottom, two servos and the battery are located. The control surfaces are made with a 0.5mm aluminum sheet
At the top, there is the Raspberry board. The board is mounted on a plywood base that should absorb vibrations, and kept in placed by four rubber rings ( as suggested by this tutorial)

Finally here is the counter-rotating motors

Now I need to mount and connect all the electronic components (ESC, BEC, receiver)
Top Comments
-

screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children