

Table of contents

Abstract
My goal is to make the sewing machine accessible to all who has leg impairments and disabilities. In this very first writing I will test the challenger kit that includes a stepper motor, Trinamic stepper motor controller and a host microcontroller board.
Project
My Goal
Sewing can be a good option for passing time and doing something productive for the people who have leg impairment as sewing work can be performed while sitting in one place. But the problem is sewing machines are foot operated and are not accessible the to people who have disabilities on both legs. Therefore, modifying sewing machines presents an excellent opportunity for individuals with disabilities, particularly those with disabilities affecting both legs. So, in this Start a Movement Challenge I want to modifying the sewing machine foot pedal to a hand pedal for individuals with leg impairment.
My Motivation
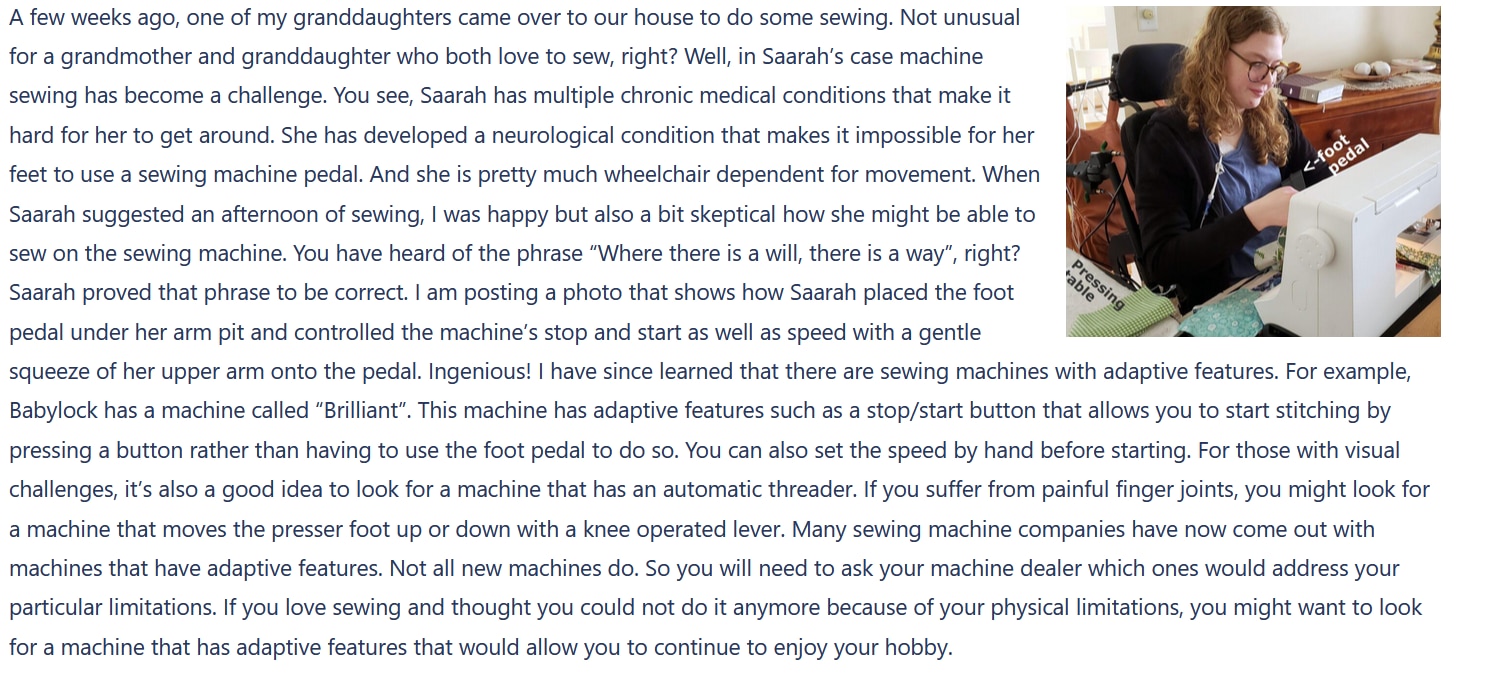
The following few stories motivated me to do this project. This project aims to alter societal perceptions by modifying sewing machines to be hand-operated, thus enabling individuals with disabilities to work independently. By adopting the lower part of the sewing machine, which is typically foot-operated, to be hand-operated, people with disabilities can become self-sufficient. This change will help shift their status from dependent to independent, demonstrating that individuals with disabilities can contribute to society equally in terms of work, lifestyle, and meeting their needs and wants.
The Outcome
Currently, all types of sewing machines require the use of legs for operation, making them inaccessible to individuals with leg disabilities. My modified sewing machine is fully operated by hand and specifically designed for those with disabilities affecting both legs. This innovation will transform the lives of these individuals, increasing their productivity and integrating them into the garment industry, where the ability to sit for extended periods is beneficial.
The Challenger Kit
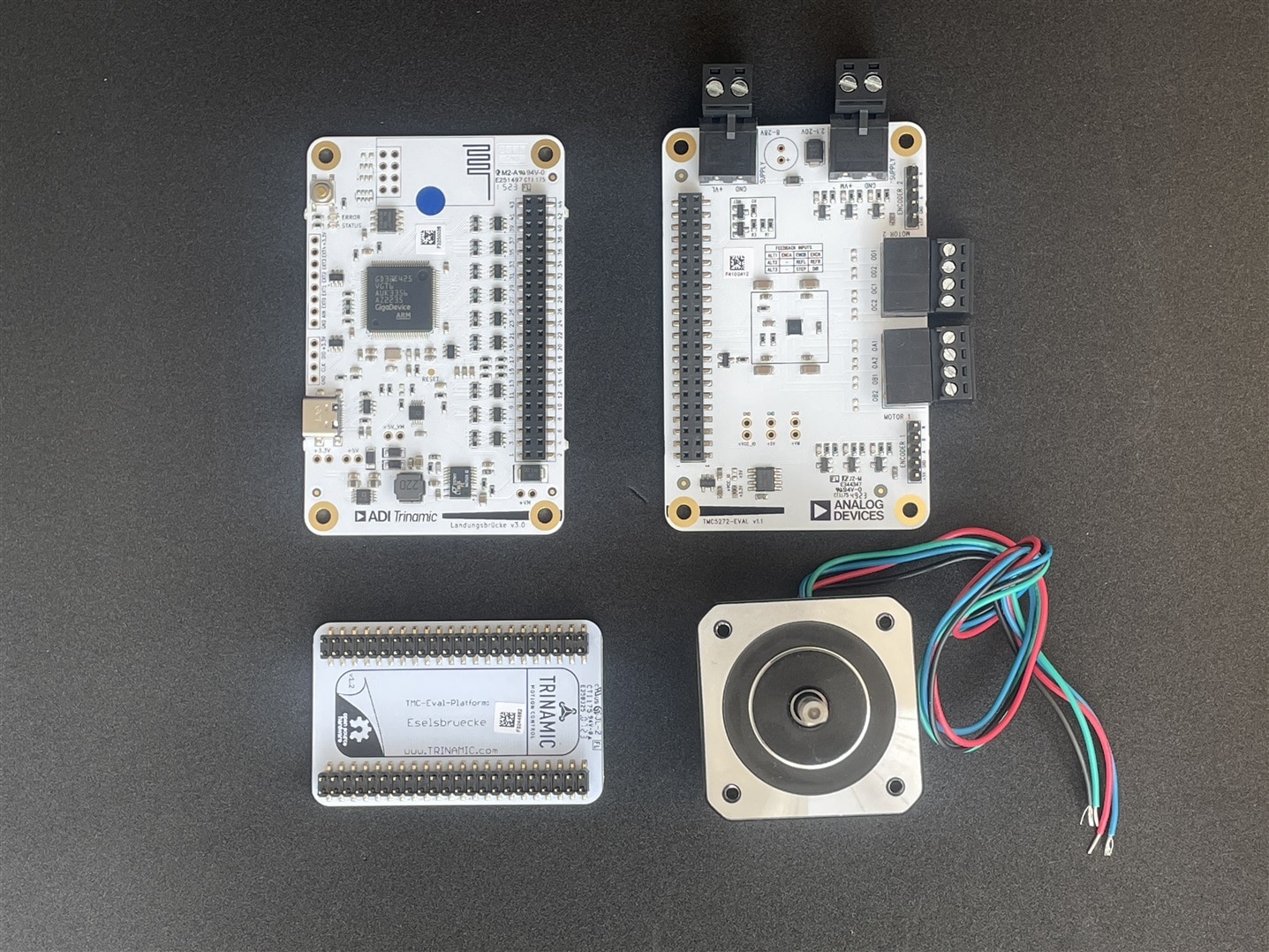
At the beginning I would like to thank Element14 and Analog Devices for sending me the challenger kit. Below is the photograph of the kit. The kit includes a TMC5272 smart, high-performance dual-axis stepper motor controller and driver that supports serial communication interfaces (SPI and UART) and a QSH4218-35-10-027 two-phase hybrid stepper motors optimized for microstepping. It also includes a microcontroller unit for controlling the motor.

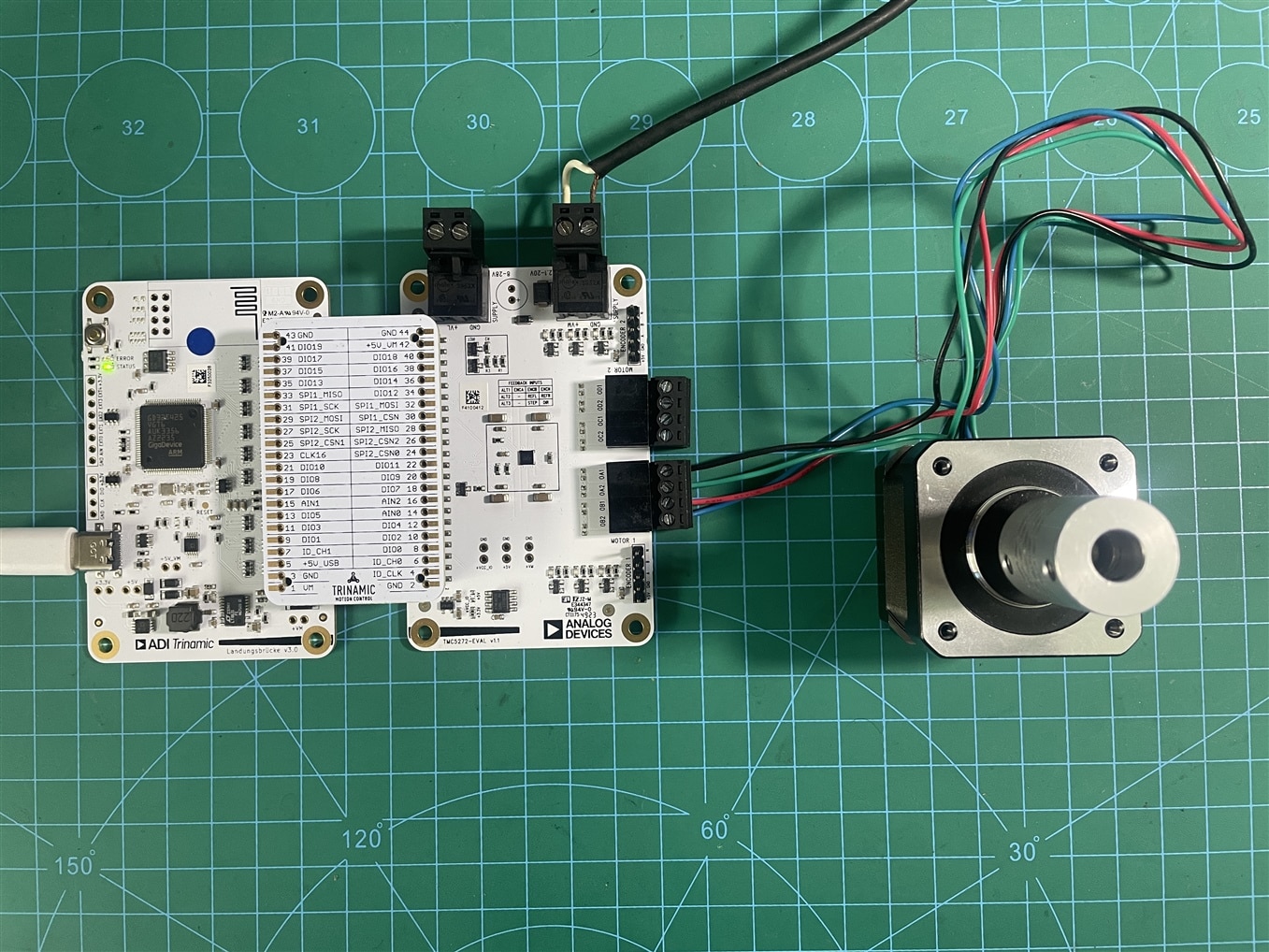
Based on the following diagram from the motor datasheet I connected the stepper motor to the MOTOR1 port of the Trinamic Motor Controller Board (TMC5272).

For testing the motor and motor controller I downloaded the TMCL-IDE from Analog Devices (https://www.analog.com/en/resources/evaluation-hardware-and-software/motor-motion-control-software/tmcl-ide.html) and installed it to my PC. After installing unfortunately I did not find the IDE from the installed software list. So, I needed to run it manually from the location where it was installed. When I first run it, I was asked to download the latest firmware and I did it accordingly.

I was able to install the latest firmware without any issue.



But after installing the firmware my PC was not recognizing the board. I was a bit nervous. But the problem was solved after restarting my PC. I read the TMC5272 user manual carefully and was able to successfully experiment and run the motor. I added a video of my experiment below. I used a single 12V power supply for powering the motor.
References
1. TMC5272-Evaluation Board (https://www.analog.com/en/resources/evaluation-hardware-and-software/evaluation-boards-kits/tmc5272-eval.html#eb-overview)
2. TMCL-IDE (https://www.analog.com/en/resources/evaluation-hardware-and-software/motor-motion-control-software/tmcl-ide.html)
3. QMot QSH4218 Stepper Motor (https://www.analog.com/en/products/qsh4218.html)
4. TMC5272 User Manual and Datasheet (https://www.analog.com/en/products/tmc5272.html)