


This is sooo much fun getting to play engineer !
Parts provided by the Twist & Turn competition are still in transit, so build progress was made using substitutes from my own on hand inventory.
For electric airplanes and drones, AC brushless motors are usually the go to propulsion engine, shaft rpm 7000, 8000, and higher ! The challenge here is to use a standard DC motor with an H bridge.
The Pool Butler airboat design is wide open undefined right now. Its one of those projects where there is significant experimentation……. build a prototype and learn the requirements.
Needed thrust is unknown. There is no expectation yet for needed speed or towing load. Braking ? The cool thing about using a DC motor and an Arduino, yes, the prop can be made to spin backwards to attempt air braking.
One requirement though is to keep the electronics fairly dry. Each control axis – propulsion, steering, and capture hook, will be built & tested in functional control modules, each mounted in its own somewhat sealed splashproof compartment. Interposing wiring will utilize supplied TE connectors.
The airboat will need power. My highest power LiPO batteries are 3S 11.1V 800-2200 mAhr. Later experiments will define the needed battery load requirements VS time at sea and vessel weight-momentum.
To start the project build , the longest propeller with the largest pitch ( bite ) was selected from my limited inventory,an 8 inch propeller blade with 60 degree pitch. The props I have on hand were previously bought for a 1 meter wide flying wing, built from instructions found on https://www.flitetest.com/get-started/airplanes , but that adventure is another story for later.
Next to find a DC motor for propulsion. None of the DC motors in my collection have a data nameplate.
Mounting the prop on the DC motor shaft using a bullet connector, it will need testing to see if there is any hope to generate enough thrust to push an airboat, and secondly what is the electrical loading of the motor. These measurements will help determine motor specification & selection.
Measuring shaft rpm is where this project goes off path onto an unexpected tangent. Rather than buy a tachometer to check DC motor shaft rpms, I built a functional strobe tach built from junk parts laying around my workshop and a Raspberry Pi Pico. The strobe tach was entered into the Rube Goldberg Project 14 contest.
The strobe tach video https://www.youtube.com/watch?v=u_zyGa0lUD0
The Rube Goldberg & design explanation /challenges-projects/project14/rubegoldbergdevice/b/blog/posts/the-junk-pile-strobe-tachometer-and-it-really-works.
With the strobe, the DC motor selected can be checked for speed/load characteristics with the propeller mounted. The rpm was also verified with a calibrated lab strobe tach , which also doubled to verify the Junk Pile Strobe operation.
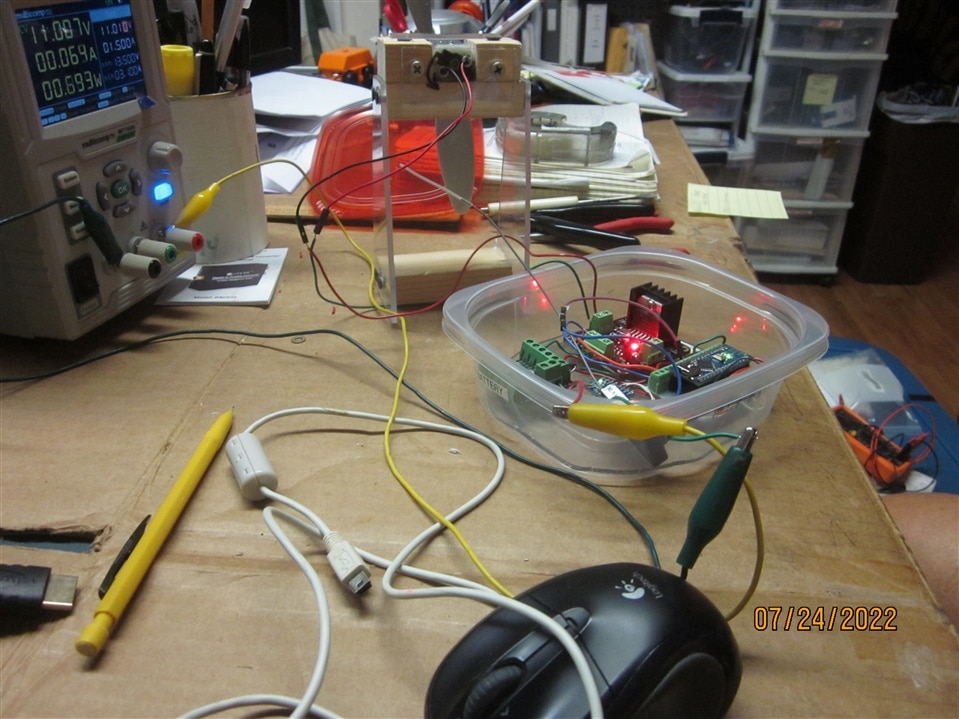
The motor selected running @ ~ 5V 380mA is about 1800 rpm, isnt generating enough thrust to push the motor mount over. 11V the thrust is strong enough to move something, and really sounds like an airplane taking off. The DC motor amps measure about 800 mA at 11V 3000 rpm, which is within the spec of the H bridges provided by the Twist & Turn Competition.
|
|
measured |
measured |
|
motor Vdc |
mA |
rpm |
|
5 |
380 |
1814 |
|
7.5 |
550 |
2328 |
|
10 |
750 |
2724 |
|
11 |
800+ |
2824 |
I have expectations this motor will be burned out by the time of project completion. Another motor has been selected in the event this motor burns out sooner than expected. The “Plan B” motor selected tho is 6000 rpm and has 5Adc full load amps. The airboat will have some major muscle with “Plan B motors” but will then could possibly burn out the H bridges if precautions aren’t taken to limit output voltage ( limit commanded speed reference and thereby load current).
Trade offs trade offs compromises and requirement negotiations oh my
There is also a “Plan C” to get more propulsion thrust, but it really abuses this DC motor. The power distribution board in the propulsion compartment has a terminal board that would allow insertion of a BOOST power supply for the motor and H Bridge. More volts = more speed = but also more motor amps. It would have to be limited to enough volts to drive the motor to the limits of the H bridge, maybe 1.5A average, which is almost double the amps already. Lets fry that motor.
**** NOTE: To keep "Plan C" as a viable option, the H bridge must be able to accept >12V input. DFR0502 Gravity: IO Expansion & Motor Driver Shield spec lists a 12V max input. The DRI0002 used in the build accepts up to 48Vdc on the bridge. DRI0017 2x2A Motor Shield also specifies up to 35V.
Another detour project was done to test the Arduino with an MPU 60505 gyro and a SSD1306 OLED display screen. The project is more or less is a 3 dimensional digital bubble level, and was really fun to play with.
Blog 2 concludes with photos and the demo of a functioning Pool Butler propulsion compartment
( minus the TE interconnections )
The demo video: https://youtu.be/DyBKI_b8H4I
The Arduino Nano, the DRF002 H Bridge, MPU 6050 are mounted on a plastic plate
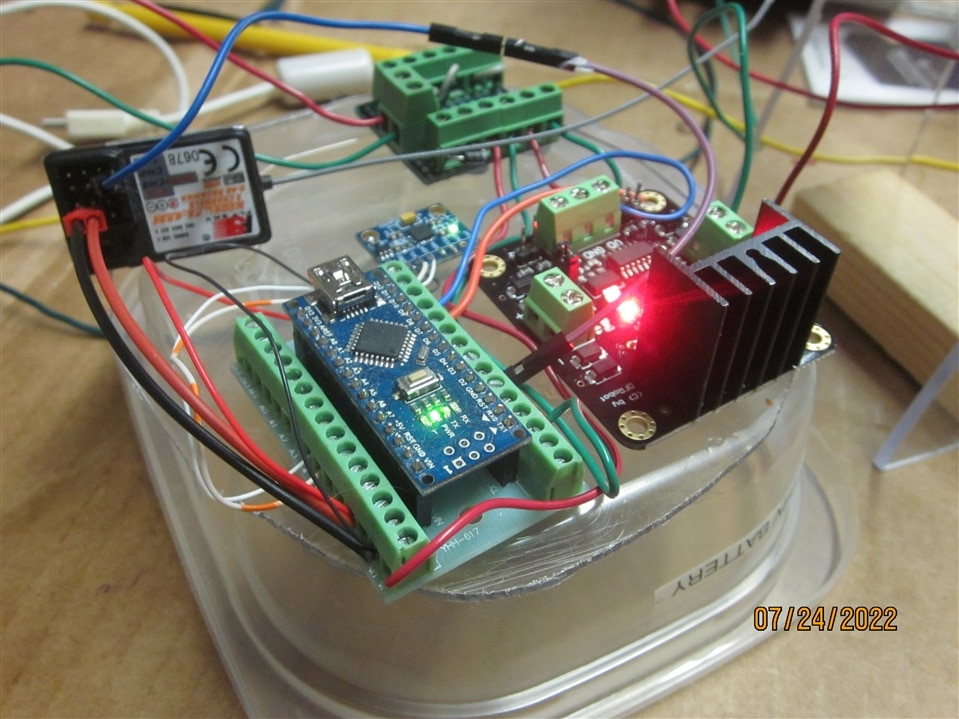
The base panel fits inside the sandwich container
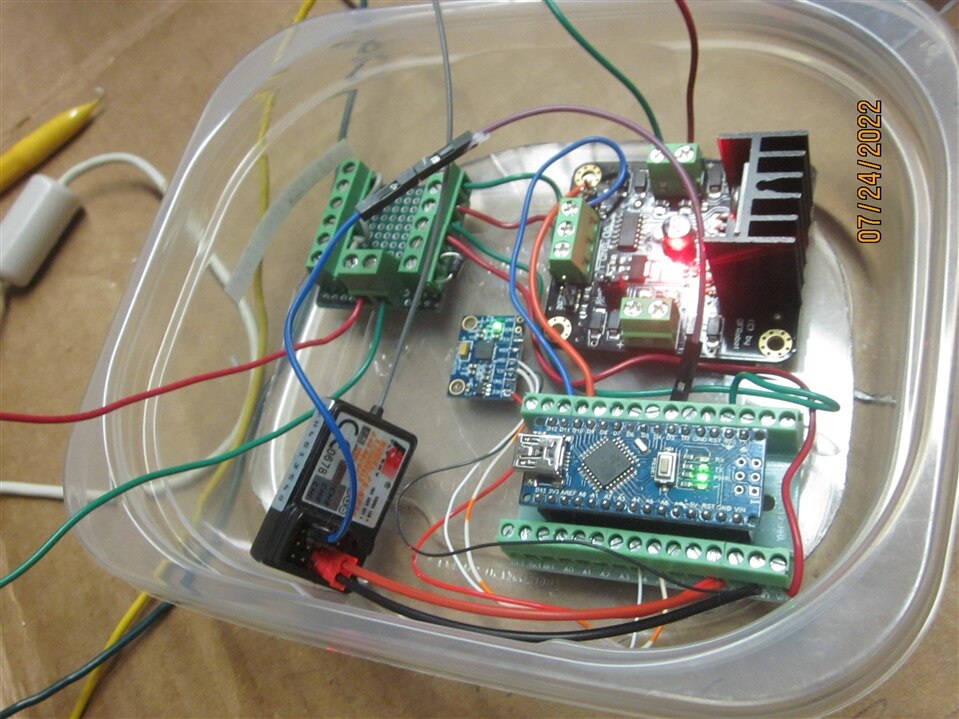
snap on the lid (minus TE connectors) keep the water at bay
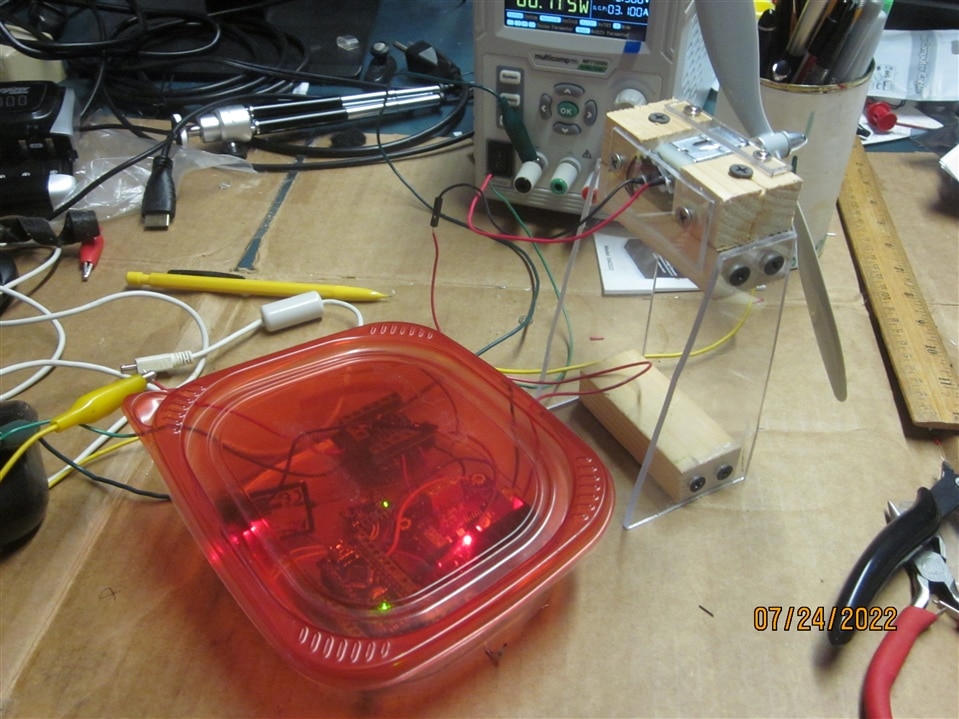
propulsion testing in dry dock
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children