


Part 1: Pump Control
A successful vertical hydroponic system will require absolute control over its nutrient solution. In the end, this comes down to control over liquid pumps using feedback from sensors. This project will use two different kinds of pumps and at least one sensor to control the nutrient solution that is delivered to the plant roots.
The first type of pump is the submersible or inline magnetic drive pump sometimes called a “pond pump.” This is a relatively efficient and inexpensive pump that will move water and nutrient solution. The ones I will be using will run off of 120 VAC. There will be one pump to move filtered water to the mixing reservoir, one pump to move nutrient solution from the mixing reservoir to one of the distribution reservoirs, and each distribution reservoir will have a pump to feed the plants. Control over these pumps has a lot of room for error and I really only need accuracy of around +-200mL. Feedback will be provided by ultrasonic distance sensors that are individually calibrated to each container.

The second type of pump is a peristaltic pump. These pumps are more expensive and accurate than submersible mag drive pumps. The ones I will be using will run off of 12VDC. They will add the required amount of nutrient or PH down to the missing reservoirs whenever a new solution is created. These pumps will be individually calibrated to determine the amount of liquid pumped per second. Mixing nutrient solution requires a much higher level of accuracy. I am aiming for +-10mL per dose. There will be no feedback mechanism for these pumps. This is mainly due to the expense of constantly submersible PH or TDS meters. Eventually I will add these sensors, but for this challenge I am simply going to measure the amount pumped per second to calibrate, and pump for x seconds to create a recipe.

To switch the all of the pumps I will use optically isolated solid state relays. These pumps will all be less than 50 Watts, so the switches can be small, surface mounted, AC/DC SS relays. The relays will be wired to standard outlets whenever possible to avoid having to destroy pump plugs. I will be using something like the CPC1025N from IXYS for this part.

The main sensor I will be using for feedback here is an ultrasonic distance sensor. The HC-SR04 is a very inexpensive module commonly used for this purpose. For each reservoir I will calibrate the sensors by filling them with 500mL at a time and measuring the echo time. This should allow me to control for the difference in the sensor and the container.

Time and expense permitting I will add PH sensors, flow sensors, and TDS sensors to my reservoirs. I will not add these at first though, because the advantage they seem to offer is small compared to the cost of components and integration time.
I have copied an image below and attached a very, very early rough incomplete, first draft schematic of my pump control system. It means very, very little at this point, but I really just wanted to get symbols and models of the components I intend to use in Eagle. I will require level shifters, bypass capacitors, and more, but this is a bare minimum starting point for this portion of the I/O.
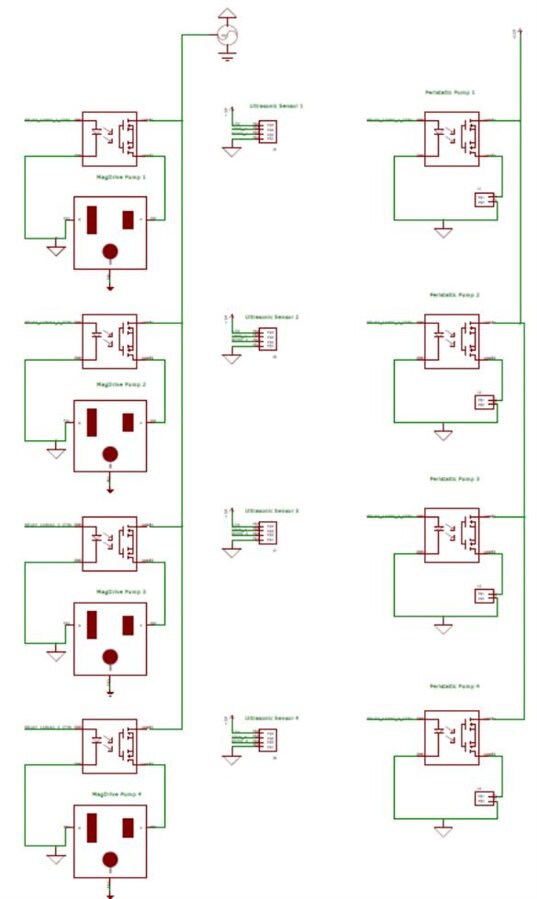
| Pump_Control.pdf |

-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children