

To learn about robotics, Milos was looking for an affordable 5 Degrees Of Freedom (5DOF) robotic arm. Although affordable arms do exist, they are usually too small and only offer a few degrees of freedom. Robotic arms that satisfy all requirements, including build quality and range of motion, usually cost in the range of a few hundred dollars.
In this video, Milos sets out to create a high-quality 5DOF robotic arm that everyone can afford.
Jump to Downloads & Bonus Content | Jump to Discussions
Watch the Video:

Design & Assembly
Milos decided to 3D print the necessary parts. 3D printers are widely available now, and 3D printing parts, such as a large bearing, can be more cost-effective than finding one from a retailer. Large bearings can get expensive fast, especially if you’re looking for an unusual size. For the ball bearings, the idea was to use 3D printing for the inner and outer rings, and use common glass marbles for the balls.

For powering the robot’s joints, Milos decided to use small servo motors. They are easy to find and easy to control using any microcontroller because all they require is a PWM signal. Milos chose small DFRobot servo motors because they are designed to protect the motor if the current draw is too high for too long. The motor also has a clutch that allows it to start skipping if the load is too great, protecting the inner components. Simple rotary potentiometers were used for position feedback. Potentiometers work well with a microcontroller and offer the additional benefit of taking a bit of strain off of the servo motor shaft if they are paired for each of the modules (illustrated in the following diagram).

All of the robot arm's parts were 3D printed (all of the files are available free to download).
Electronics
Electronics for this initial build ended up being rather simple. Milos chose a Raspberry Pico W for this build, because they are popular, inexpensive, and their small size leaves room for components, such as a wireless control, to be added in the future.
Faulty Circuit
The Pico was required to provide six PWM outputs for each of the six possible servos (the sixth servo would be the gripper servo), as well as six input channels for the six potentiometers. The Pico only has three ADC pins, however, so Milos added a CD4053BE multiplexer to accommodate more I/O.

The circuit is pretty simple, however, it didn’t work. Milos returned to the datasheets and found that the microcontroller was running off of less voltage (3.3V) than the minimum voltage that the multiplexer required (3.5V). To fix this, he added a shifter circuit using an optocoupler (4N27), as illustrated in the following diagram.
Corrected Circuit

Final Schematic
Here is the final schematic:

The pinout for the Pico is as follows:

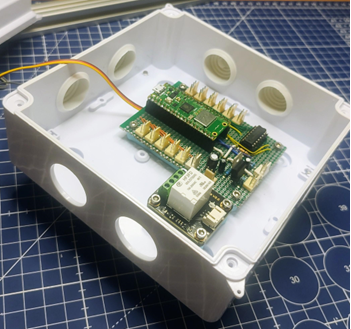
The final step was to solder everything to a piece of perf board and put it into a box.

Software
Software is still a work in progress and will take more time, but for now, some simple commands have been implemented:
- Disabling all motors by taking the PWM to 0% duty cycle and switching the relay OFF
- Turning ON the relay
- Setting an angle on a single joint
- Setting an angle on all joints at once
- Calibrating the potentiometer readings on the min/max range of the servo motors
The most important functions left to be implemented are position record and playback, which record the ADC values for all potentiometers, store them, convert the values to angles based on the parameters from the calibration procedure, and then playback those angles at a given speed.
Links and Downloads
- Github: https://github.com/MilosRasic98/CheapRobotArm
- Download: CAD Files and Code
- DiPinto Da BRACCIO - Idea & Plan - Blog 1 by milosrasic98
- DiPinto Da BRACCIO - Meet the Stars - Part 1 - Blog 2 by milosrasic98
- Sensor Kit For BRACCIO by milosrasic98
- Tinkerkit Braccio Robot Arm by ntewinkel
- Rube Goldberg Machine to Turn On a Light by ntewinkel
Bill of Material:
| Product Name | Quantity | Buy Kit |
|---|---|---|
| RASPBERRY-PI Raspberry Pi Pico W Board, RP2040, 32 bit, ARM Cortex-M0+ | 1 | Buy Now |
| DFROBOT DFR0473 Relay Module | 1 | Buy Now |
| TT ELECTRONICS / BI TECHNOLOGIES P160KNP-0EC15B25K - Potentiometer | 5 | Buy Now |
| DFROBOT SER0050 - Small Servo Motor | 5 | Buy Now |
| PRO SIGNAL PSG08611 | 1 | Buy Now |
| PRO SIGNAL PSG01595 | 1 | Buy Now |
| MULTICOMP PRO MP008930 - PLA filament | 1 | Buy Now |
| CD4053BE - Texas Instruments Analog Multiplexer | 1 | Buy Now |
| DFROBOT SER0044 - Servo with analog feedback | 1 | Buy Now |
Additional Parts:
| M3 screws and nuts |
| Perfboard |
| Passive components like resistors, capacitors, wires |
| 150mm Junction Box |





