



Avnet Brainium Module mounted on the drone.
They are everywhere: Drones are now used in agricultural automation, surveillance, photography, logistics, organ delivery, operation and rescue missions, and a wide variety of researches.Quadcopters and multirotor: Most of the drones are multi-rotors like quadcopters, hexacopters, etc. fixed wing drones are very few and are used mostly for military surveillance due to their long endurance. Conventional quadcopters are highly inefficient by design and need a lot of power to hover and travel because it will be pushing air against gravity. In order to fly against gravity, it should push a commensurate amount of air.
Quadcopters are special: But what makes quadcopters stand out is their agility to move and maneuver in tight spaces and capability of hovering at a point. This is quite difficult for the normally fixed-wing drones. Staying at a point in free space helps you to record wonderfully stable videos and take stunning photographs of building in aerial view and many more things.
But they are dangerous: In order to hover or fly against gravity brushless motors with very high RPM(revolutions per minute) are used in drones. These brushless motors are fitted with propellers that are razor sharp so that they can cut through the air experiencing very little air friction. This makes the whole system very dangerous as there are 4 very sharp blades spinning at 11000RPM with a Li-Po (Lithium polymer) battery which can overheat and explode in midway so this kind of system needs continuous care or health monitoring in order to work properly. Manual inspection of propellers are not enough as any break in the propeller can lead to fatal injury to drone pilot and people nearby.
So predictive maintenance of drones is an essential thing in this technology-driven world.
Another main thing is that this module can be directly used for the predictive maintenance of industrial machines also. Just the training data for vibration AI is different.
Get the required things. Here we are using a Raspberry Pi, A drone with a flight controller and the most important thing is our avnet brainium module.
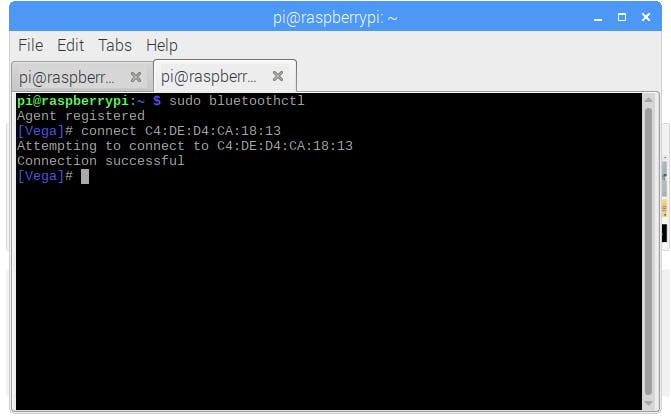
Let's connect the brainium module to the Raspberry Pi via Bluetooth.
sudo bluetoothctl scan on pair [MAC address]
connect [MAC Address]
Here I have chosen Raspberry Pi because we can make the gateway as mobile and it can fly with the drone.
I have connected my Raspberry Pi with the SmartEdge Agile device.
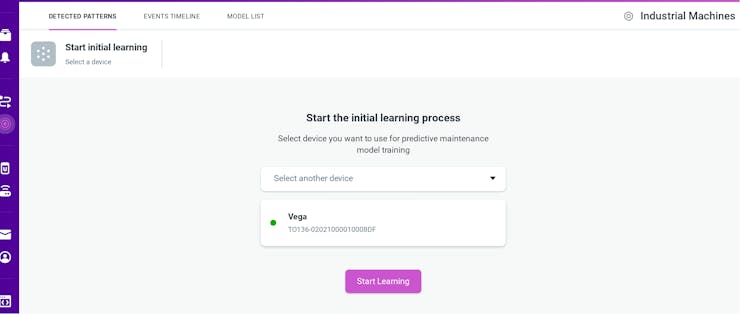
Brainium Module Configuring UI
1. Broken propeller
2. Broke connection
3. Damaged propeller, i.e dangerous to fly
4. Stationary drone
5. Drone running without propeller
6. Drone running with propeller
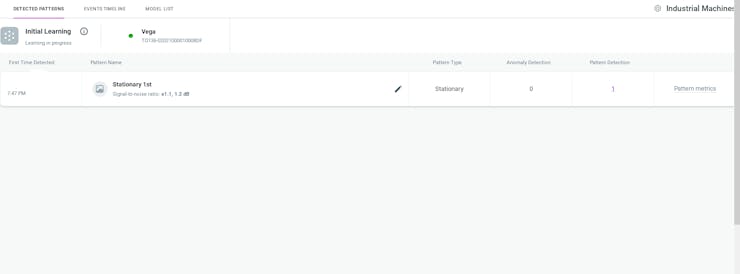
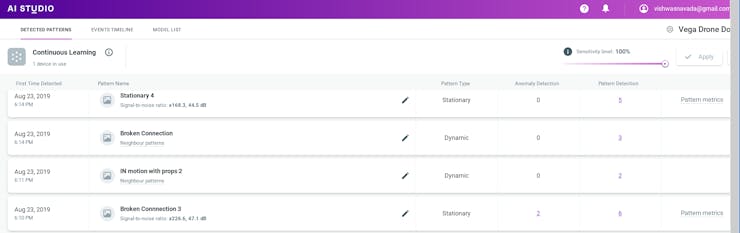
Training for different scenarios
This is basically testing and fine-tuning the generated model. This helps to improve accuracy of the system
The results in the changes detected is set as alerts so that we can give notification through a buzzer. For this, we need an MQTT protocol for the real-time detection of alerts. I'm using Paho MQTT Library. and here is the code for the same.
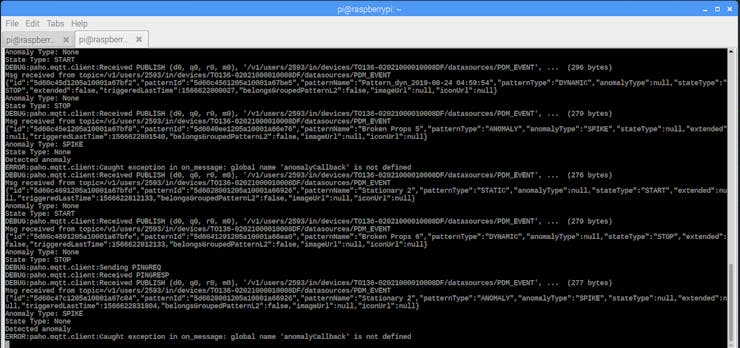
Alerts for showing the detection of anomaly

Logged alerts

Raspberry Pi with Drone
- Drone health monitor for future cargo drones
- Drone diagnostics tool for quickly detecting the fault