


Idea Behind this robot is to built a STM32+ESP based platform with capability of driving several types of mobile robot platform with Autonomous, IrDa, RF, WIFI, Internet OR Voice control. The NUCLEO STM32 board is responsible for motor control based on ESP/IrDa/RF/Autonomous mode. It is interfaced with ultrasonic rangefinder to detect obstacle. Fun part of its program is, if u will come near to it, it will move away from you and try to maintain a user fix distance regardless of current mode. ESP-12E is acting as web server hosting and it is relaying control information to NUCLEO board. ESP-12E is working in both Station and AP mode so it can be controlled through its own WiFi network even if there is no external WiFi/Internet network is available.
Soon I will share all the codes, working demo and custom PCB shield (Only Schematic) containing all the hardware so anyone can use it by simply plug n play.
Hardware
- ST32F411RE board (Main control Board)
- STM32F103C8T6 OR Arduino board for RF remote control
- 2 x NRF24L01
- DIY ESP8266 board (Web server for remote control)
- DIY Motor Driver Board
- 16x2 LCD to display info
- DIY Power supplys
- RC car OR any DIY platform
- 2-axis Joystick
- Battery Indicator
- IR VS1838B for IrDa remote control
- Ultrasound + IR sensors for obstacle detection
- Limit switches for bump detection
- LI-Ion Cells
Software
- Arduino IDE
- mbed IDE
- Adafruit IO
- IFTTT
- GOOGLE Assistant
- Any html/css/js file editor (i.e: Atom, Notepad++)
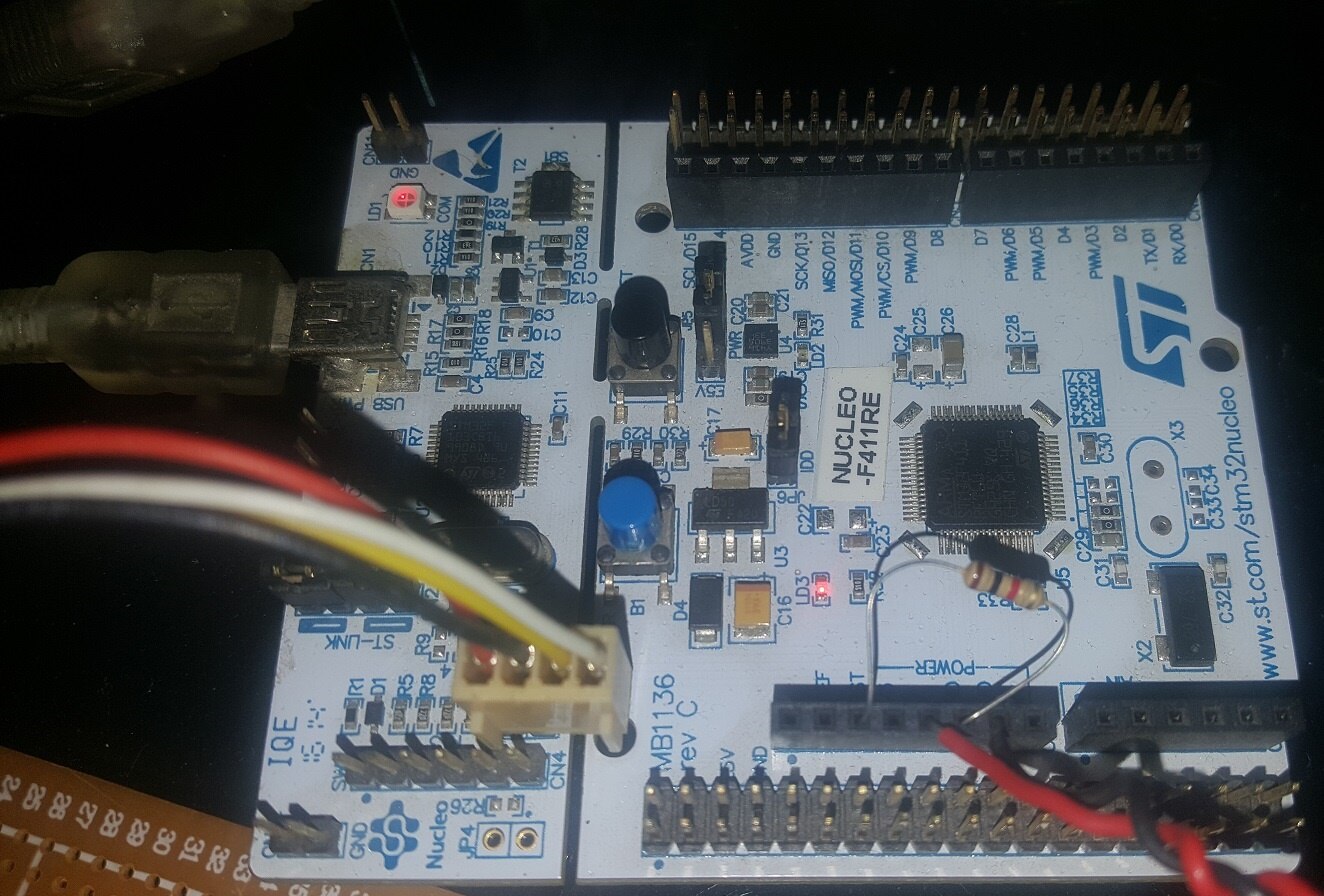
STM32F411RE Robot Main Control Board
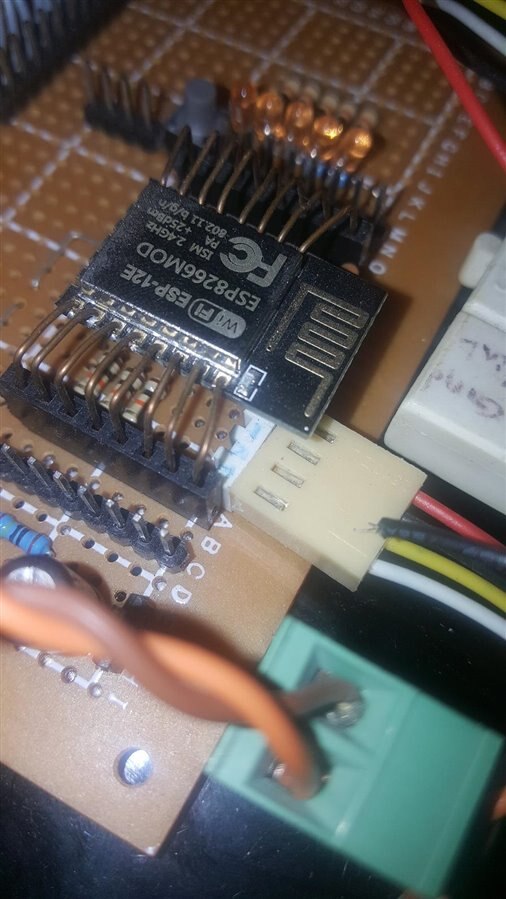
ESP12-E board hosting web server for WLAN/Internet/Voice control

Arduino For RF remote

2-Axis Joystick For RF remote
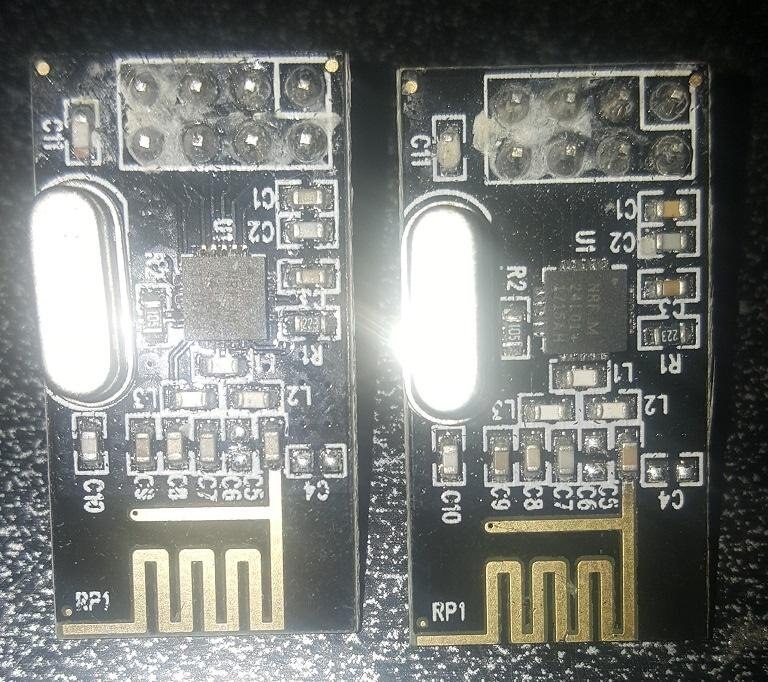
2xNRF24L01 For RF remote

IrDa Receiver to Control through any IR Remote (TV, AC etc)
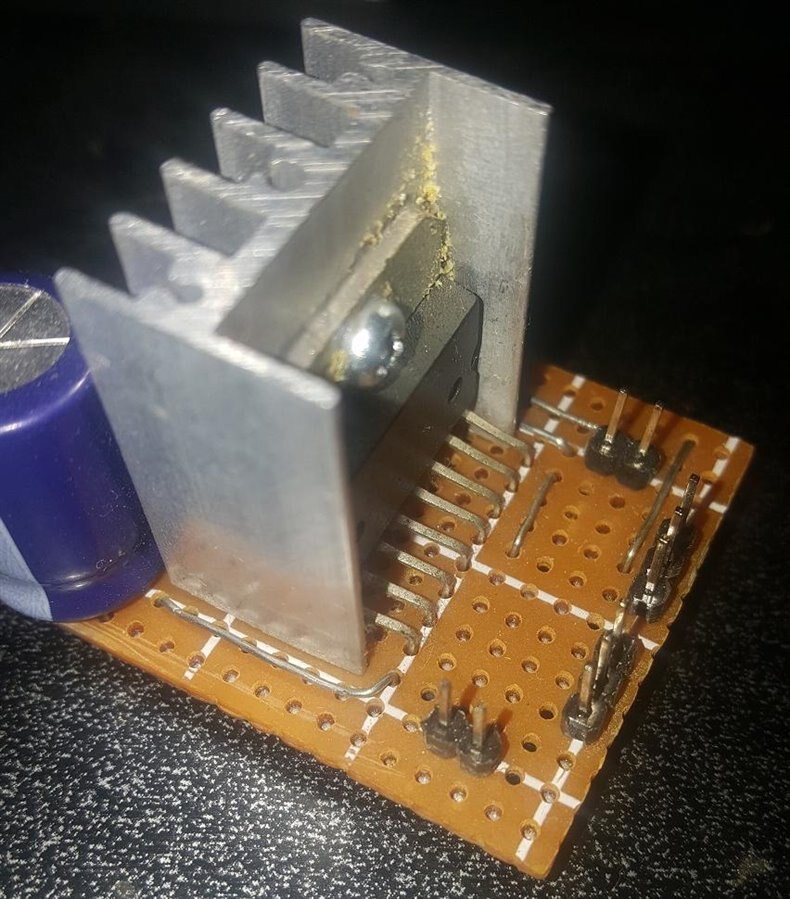
L298N motor Driver

3.3V LDO for esp
16x2 LCD to display information
Adj Buck regulator for motors
Battery Indicator (simply press button to check voltage lvl without turning on the Robot)

Limit Switch to detect head bumps/collision

RC car chassis