


Introduction
I thought I would muscle in on some of this robotic stuff that the community are creating all over the place. I have even less knowledge of robotics than I do of electronics, so it was always going to be building a pre-manufactured kit rather than building something from scratch.
I decided a robotic arm would be in order, and to see if I could convince it to turn my manual coil winder - this is purely for me to to learn about some robotics, not because I am getting lazy!
I decided on a LeArm robotic arm kit from LewanSoul, purchased from eBay. I decided on this one as it was predominantly a metal frame and had six axis movement. I wanted a metal frame for durability and the six axes to give me the flexibility to be able to turn the coil winder handle. The LeArm costs around £100 in the UK and I also found it on Amazon for a similar price.

Robot Arm Kit Contents
The kit itself is predominantly of aluminium construction and was found to be of good quality. The parts are anodised blue, and whilst the coating is quite thin, I did not observe any damaged or poorly coated parts as they were removed from the box - a little damage was sustained during the build especially where the screws are tightened against the metal work.

Contents of the kit can be broken down into 3 main sections: Metal work, fasteners and electronics.

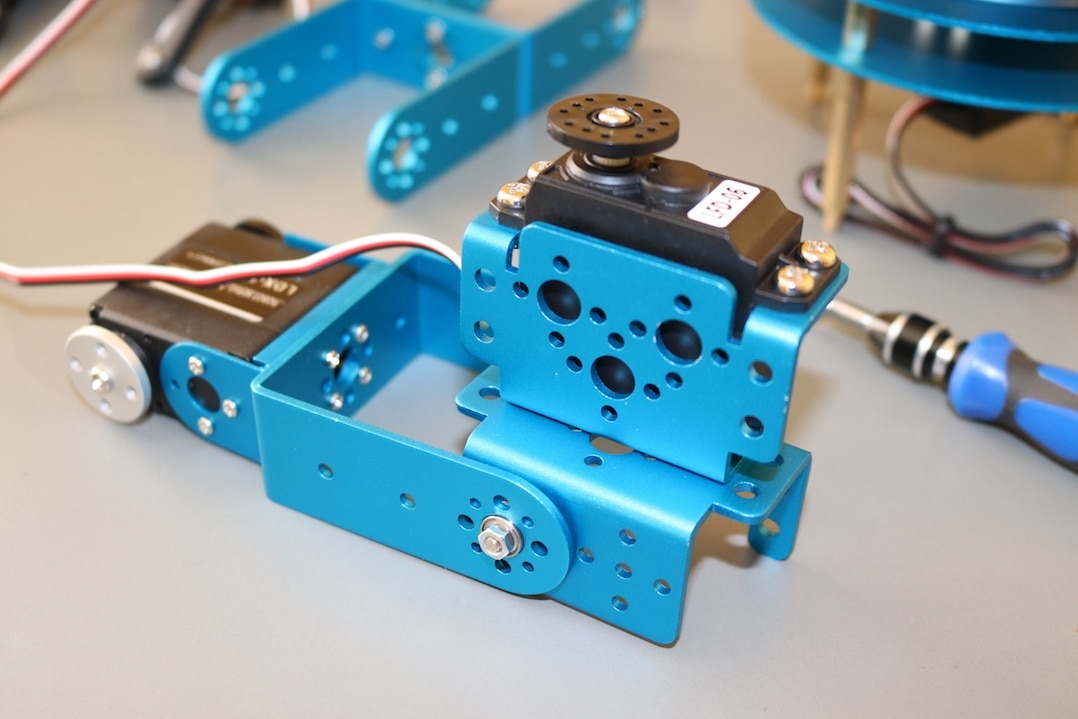
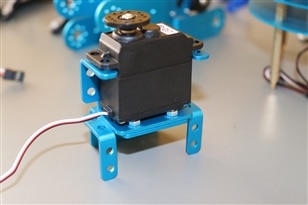
The metal work package contained a main base plate - the large black plate that the robot arm mounts on to. Five circular bottom plates and a large bearing that form the bottom rotating structure. Four u-shaped brackets that form the bottom arm of the robot, three metal plats that are made into the the upper arm and a fully assembled gripper, including the servo motor to operate the jaws.

The fastener kit included all of the nuts, bolts, spacers, self tapping screws, a bespoke bracket and screw set for mounting the gripper and a small bearing for the upper arm. It also included quite a nice small Philips screwdriver that could be used with the smaller self tapping screws. A larger Philips screwdriver and spanner were needed when assembling the machine screws, but neither of these were included in the kit.

The electronics kit contained the power supply and UK mains adapter, 5 servo motors and their associated cables, a wireless transmitter and the main controller board. A few tie-wraps and some spiral wrap were also included to tidy up the final assembly.
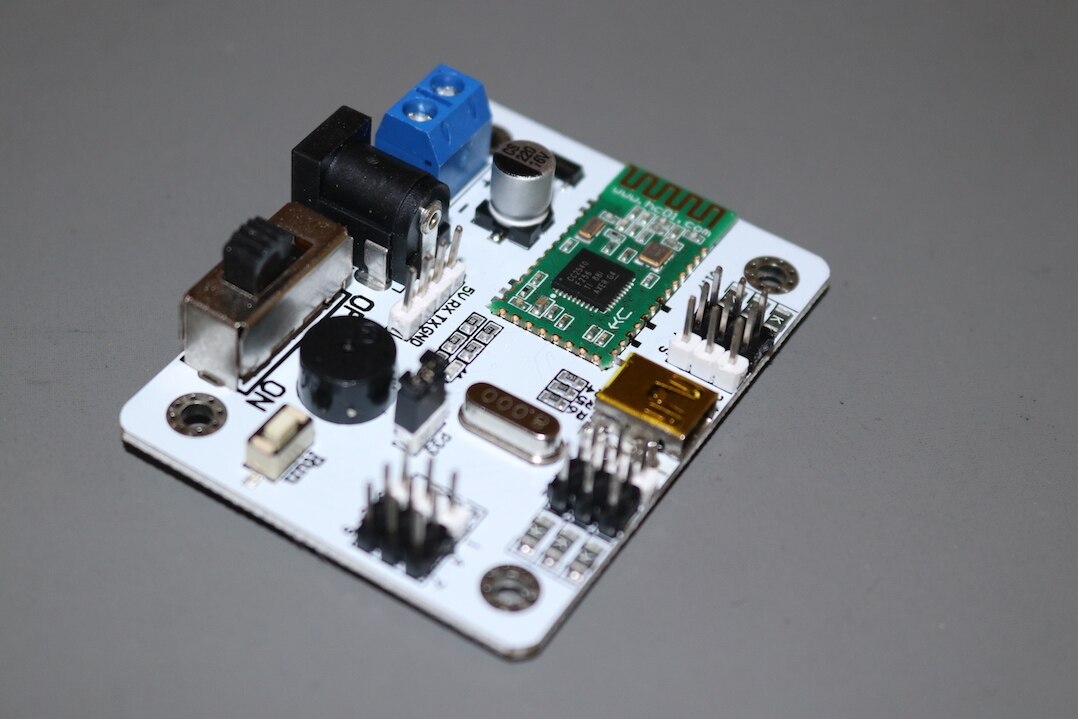
A close up of the control board supplied with the robotic arm. The board has a couple of different options for connecting power into it along with USB and wireless communications.

The main controller is on the bottom of the board, although it has not come out in the picture very well, it is an Arm STM32F103. It also contains a AMS1117 voltage regulator and a Winbond 25Q128FV serial flash memory.
Power Supply Modifications
I wasn't too happy with the mains adapter arrangement. I am not sure on the quality of the actual power supply, it has a welded plastic case so I did not venture inside it. The output was 7.5V DC and I did not have anything of my own that would produce that apart from my Rigol linear power supply. The UK adapter was of the unfused variety, so I opted for cutting off the mains plug on the adapter and fitting a standard fused UK mains plug.

You can see how flimsy the metallic contacts were inside the adapter. Connection onto the plug pins was just from closing the 2 halves of the case together. The mains wire on the power supply was very thin and in no way was suited to the typical 32A rated ring main installed in UK households. Even with a UK plug with a 3A fuse, I am not keen on leaving the supply unattended whilst it is energised.
Robot Arm Assembly
With that aspect sorted it was time to start the build - it was at this point that I realised there were no build instructions or software included in the box. Being ever the optimist I wondered how far I would get without the instructions and just rely upon the picture on the box and a leaflet included inside.
It is very easy to work out that the kit has to be assembled up in sections, before these sections can be assembled together to make the complete robot arm. Some elements were relatively straight forward and can go together without the instructions. I struggled with the more finer details around the bottom section mounting the servo drive and the upper arm, which is assembled in a slightly different manner to that in the picture on the box.
The fully assembly instructions and operating guides are contained in a set of videos on you tube, it was relatively easy to fast track through the videos to the sections that need more details and leave the screen frozen whilst the parts were assembled.
| {gallery} Robot Arm Build |
|---|
|
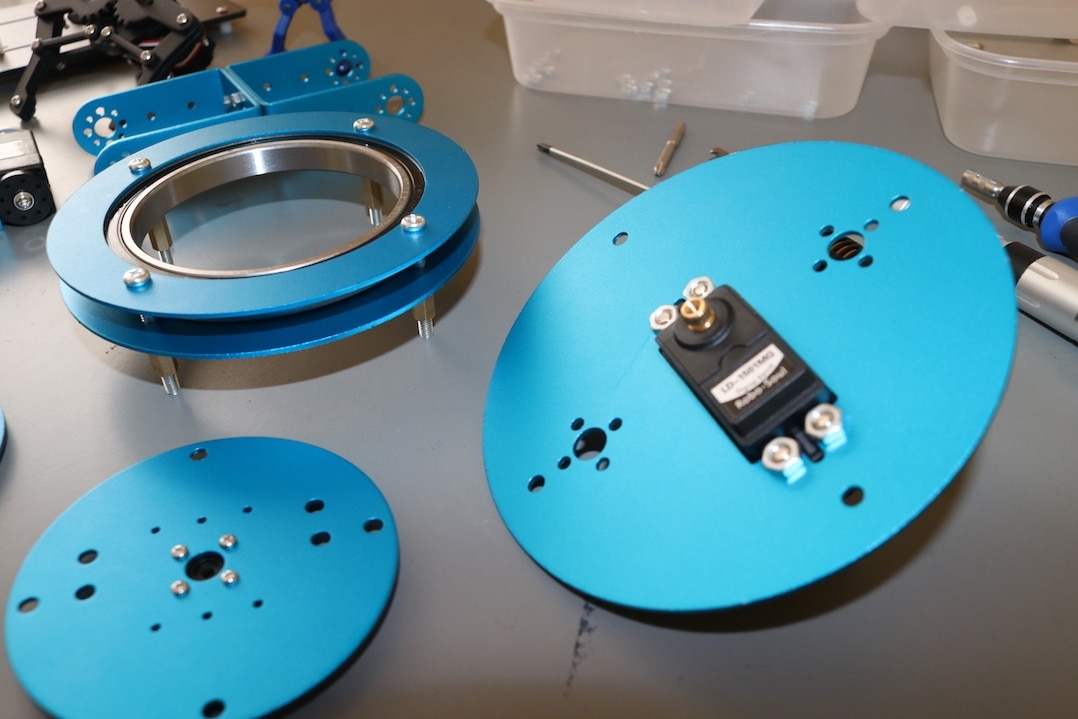
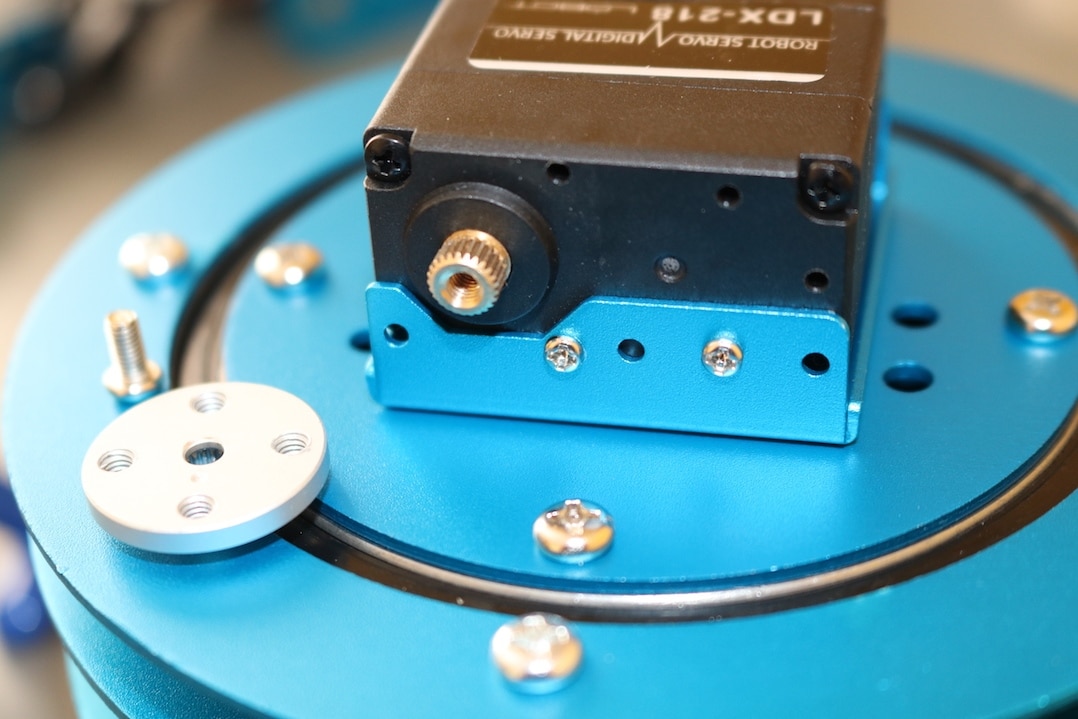
Bottom plates, servo and bearing built up |
|
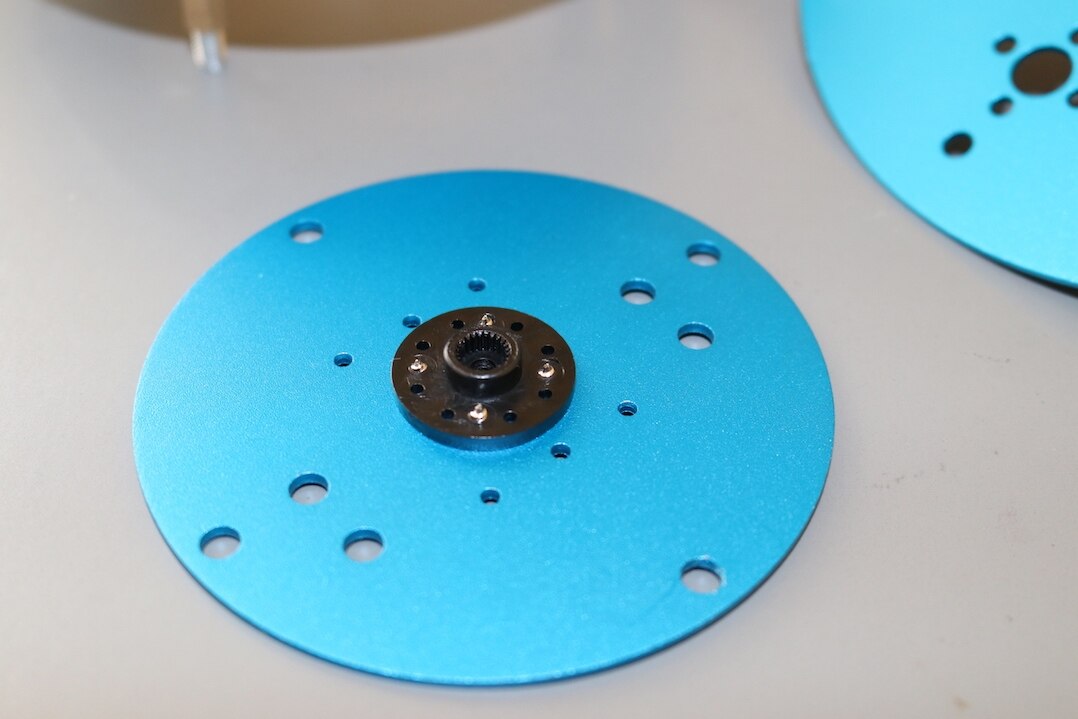
Bottom servo drive and plate screwed together |
|
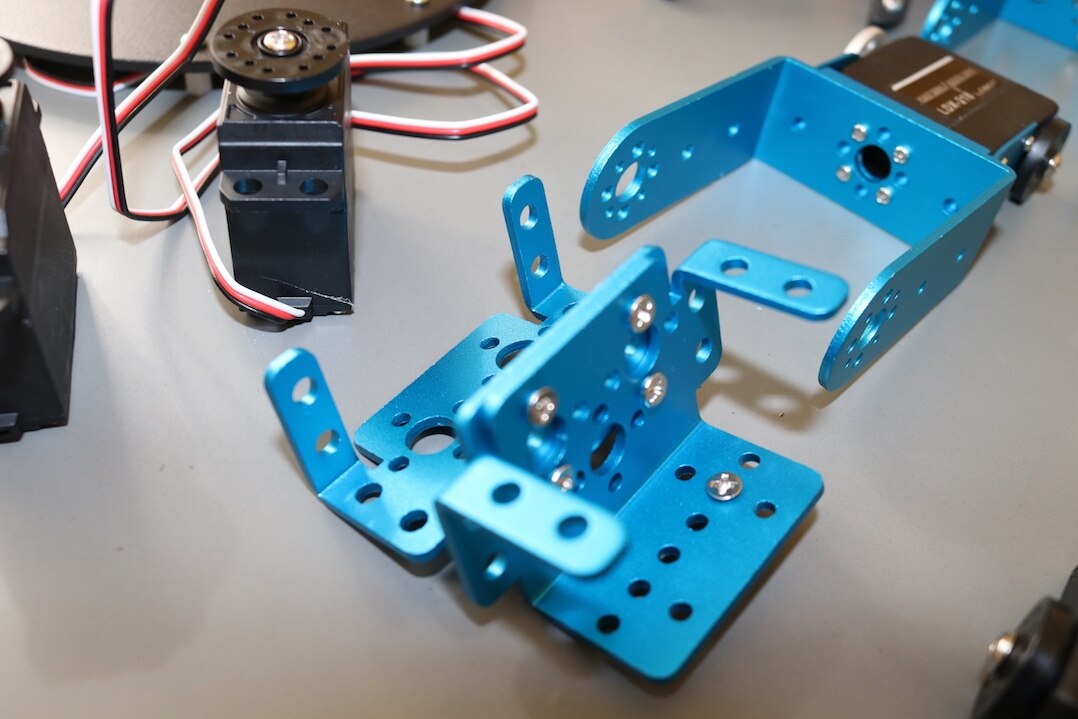
Bottom arm lower servo and bracket mounted on plate |
|
Bottom arm brackets assembled |
|
Upper arm assembled |


Once the first sections are bolted together, the assembly moves on to bolting these sections to one another
| {gallery} Robot Arm Build 2 |
|---|
|
Bearing installed between bottom discs |
|
Bottom disc assembly completed |
|
Bottom arm servo mounted |
|
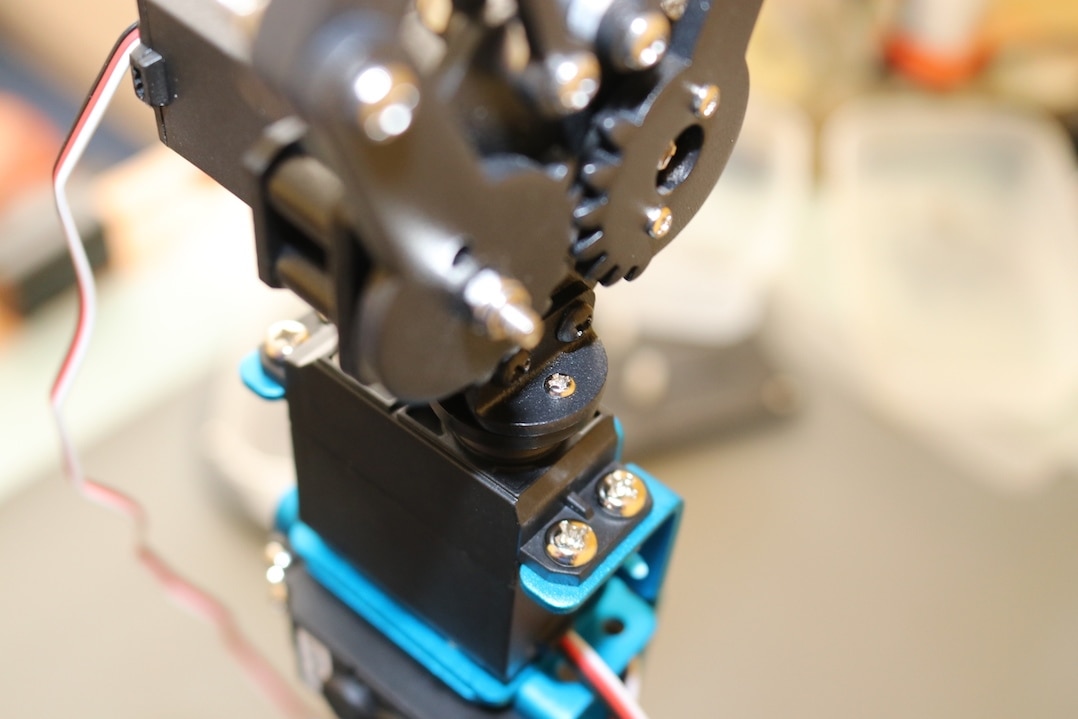
Servos mounted in upper arm |
|
Upper arm completed |
|
Lower arm offered up to bottom servo |
|
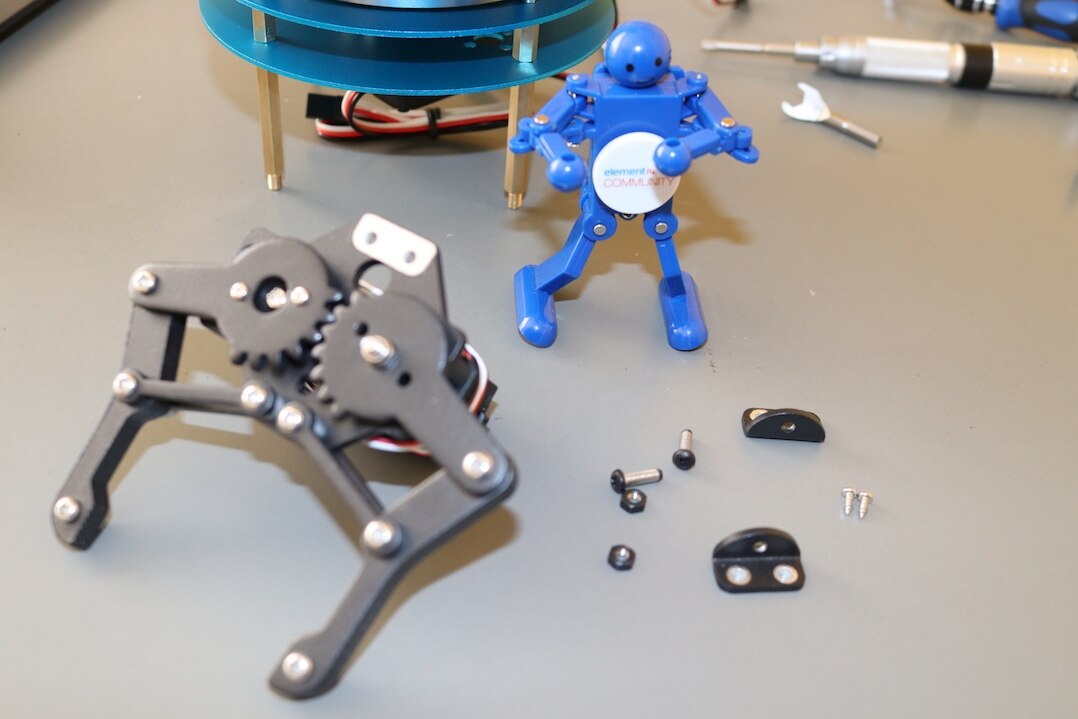
Grabber and bracket read for assembly |
|
Grabber installed on top servo |





Not too many issues arose drawing the mechanical build. I did note the following points during the assembly.
1) It was easier to remove the drive plate on some of the servos to allow the bracket screws to be installed
2) The machine screws and nuts that hold the upper arm brackets together are shown in the instructions with the bolts inserted up towards the top servo. This lifts the top servo off its mounting. I had to reverse these screws to allow the top servo to sit on its mount as seen on the right.

3) On a couple of the brackets, countersunk screws are provided to hold the plates together. A bit nit-picking of me, but I like to see countersunk screws in countersunk holes, otherwise pan / cheese head screws should be used.

4) The grabber is mounted to the plastic drive plate of the top servo with two 3mm self tapping screws - this seems a little weak and a potential break point.

With the mechanical assembly completed, the controller board can be mounted onto the base plate and the wires run down the arms and plugged into the board.

The spirowrap in used to contain the cabling and then tie-wrapped to the arms to provide support. Overall the robot took a lazy three hours to build one Sunday afternoon. It need a few more tools than those included in the kit, but there were plenty of small screws included to cater for the ones that got away during the build.

Software and Operation
The small leaflet contained within the box gives a link for the software downloads, unfortunately this didn't work. So I went to the LewanSoul website expecting to be able to find a link from there to the software, the link is there - but at the time it took me straight to the Bet365 website. I have been back onto the site since, and the links now don't go to the Bet365 website, but instead just return to the main page, so you still cannot download the software direct from the LewanSoul website.
An email to their support desk, and in their defence it was replied to the next day, with links to a dropbox that contained all of the Windows, iOS and Android software files. The robot arm has three potential control sources available, so far I have only utilised the Windows software, which allows step by step sequence operations as well as manual control via sliders and programming routines.
The iOS and Android software also allows for manual control via sliders. It also allows for the selection of preprogrammed routines that have been previously downloaded to the robot control board using the Windows software.
Finally a wireless joystick has been included with the kit that allows for manual control and selection of the preprogrammed routines.
The Windows software only contains one screen as shown below.
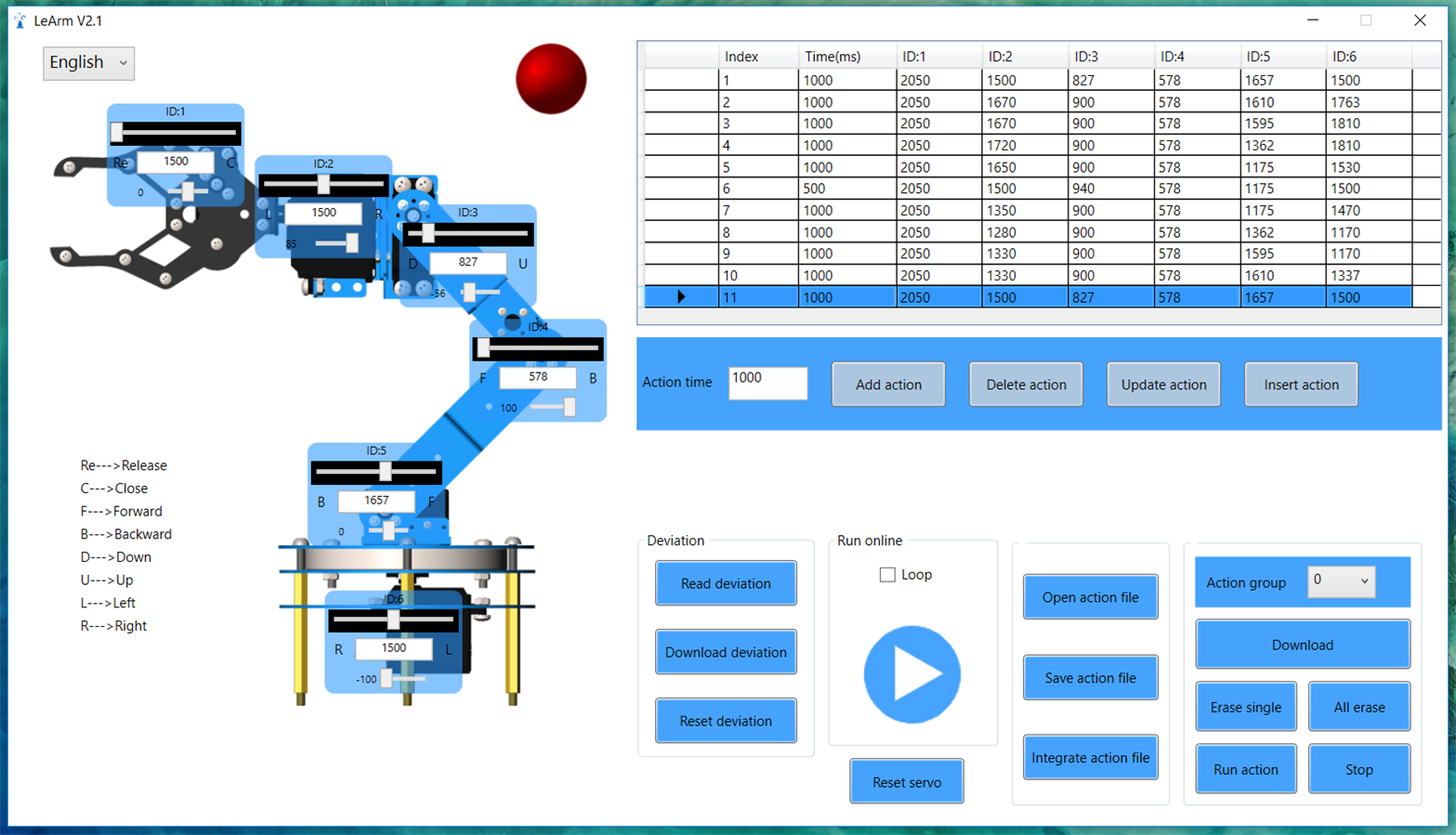
On the left, the robot arm is pictured with two sliders for each servo motor and a position readout between the two sliders. The slider below the readout for fine adjustment of the robot position with all of its servos in their neutral position and is only used once on the initial setup of the robot arm. After that, the top sliders can be used to move each servo throughout its range. One thing I did notice is that the slider for servo 5 at the bottom of the lower arm operates in reverse to the other servos.
On the top right hand side, there is a window to create a sequence of movements for the robot arm. Each line contains the duration time for the movement and then a location for each of the servo motors. Four control buttons allow action lines to be added, deleted, inserted or updated. The screenshot shows the routine I created to wind the coil winder with the robot arm.
This set of actions can be saved using buttons in the bottom right control panel. A previously created file can be recalled or a previously created file merged with the currently opened file. The sequence created can also be assigned an action group, these are the pre-programmed functions and allow either the wireless or a phone controller to select a custom program that has been created, without the need for the robot arm to be connected to the computer.
I found the software reasonably intuitive and user friendly. The only thing I found missing, that would be useful for my application, would be a loop controller that would allow the sequence loaded to be played through a selected number of times.
Turning the Coil Winding Machine
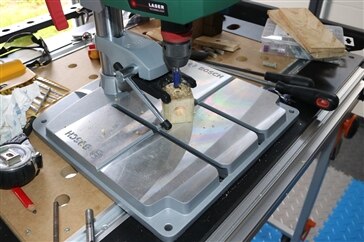
I initially started with the coil winding machine laid out next to the robot arm and utilised the windows software to attempt to turn the coil winder. This immediately failed, as the effort required to turn the handle of the coil winder toppled the robot straight over. This was resolved by screwing the robot arm and the coil winder onto a piece of scrap wood as seen below.

This allowed me to start mapping out the robot arm action to turn the coil winder using the windows software. I then found that the grabber did not seem to have the strength to hold the handle of the coil winder as the arm pulled upwards. The handle is of a tapered design and the play in the robot arm allowed the grabber to slip down the taper and then the handle would pull out of the grabber. I decided to solve this by making a block of wood that would fit loosely over the winder handle, this was augmented with two cut outs in the side of the block for the grabber to hold onto providing a firmer grip.
This worked well and I further modified the block by chamfering one of the edges so that it would rotate through the grabber without catching.

Then the biggest problem occurred, as I had not realised the stress I was putting the robot arm under whilst trying to turn the handle and one of the servo motors made out a loud graunching noise and became a bit too hot to touch. I switched off and let the servo cool down, but when I went to try the robot, although the servo would move, it seemed out of position and the control board would alarm. I dismantled the servo a couple of times and tried resetting the gearbox position, but could never seem to get it right.
A scout of eBay showed LDX-218 servo motors were available from China for £14 each, but with a delivery schedule of up to five weeks. A bit more searching found a similar looking servo on Amazon for £16, but was available on Prime for delivery the next day. I ordered on the Sunday evening, to have the servo arrive on the Monday, a public holiday in the UK, just after midday. Cannot really complain about that for service and as a bonus, the motor seemed to be completely compatible with the original and came with brackets and a screw kit.

With the servo motor replaced, the process of winding the handle was started again, with more care and awareness of the pressure being put on the robot arm.
Success was achieved and the robot arm could successfully turn the coil winding machine.
Putting Walter to work
The next stage was to see if the arm could actually wind a coil, unfortunately the effort required to turn the weight of a drum of 1.0mm diameter wire attached to the former was too much for the robot arm and it stalled it.
The coil winding machine does have the option to wind on a 1 to 1 ratio instead of the 8 to 1 it is currently set up for. I started thinking that maybe changing the ratio would reduce the load on the arm and it may be able to wind the coil. Unfortunately, I then found out that the coil winder doesn't appear to be manufactured with enough clearance to allow the 1 to 1 ratio to be used.
To change to the 1 to 1 ratio, the handle is swapped with the location of the pulley, but then it catches on the shaft that the handle used to be on. I tried taking the handle right back, but this takes the securing screw off the locating flat on the shaft, and it still doesn't quite have enough room as can be seen below.

Even with the pulley removed, there is still not enough room for the handle to get passed the shaft.

With the handle located correctly, so the securing screw sits on the flat of the shaft, there is definitely no way to complete the turn.

Flat section on shaft, showing where the securing screw locates.

I can remove the large gear and shaft completely, but then the counter will not work. At the moment, I have ordered a collar and some slotted roll pins to see if I can extend the handle by 10mm to get the clearance I need.
LewanSoul also manufacture the xArm robot arm (below), that seems more heavy duty. It doesn't appear to be available in the UK, but is on Amazon.com, so I may order one of those and fork out for the custom charges, if I don't get any success after the handle has been extended. It would be good to see if I can actually get a coil wound with the robot arm.

Top Comments