


 | Enter Your Project for a chance to win a Nano Grand Prize bundle for the most innovative use of Arduino plus a $400 shopping cart! Back to homepage | Project14 Home |
| Monthly Themes | ||
| Monthly Theme Poll |
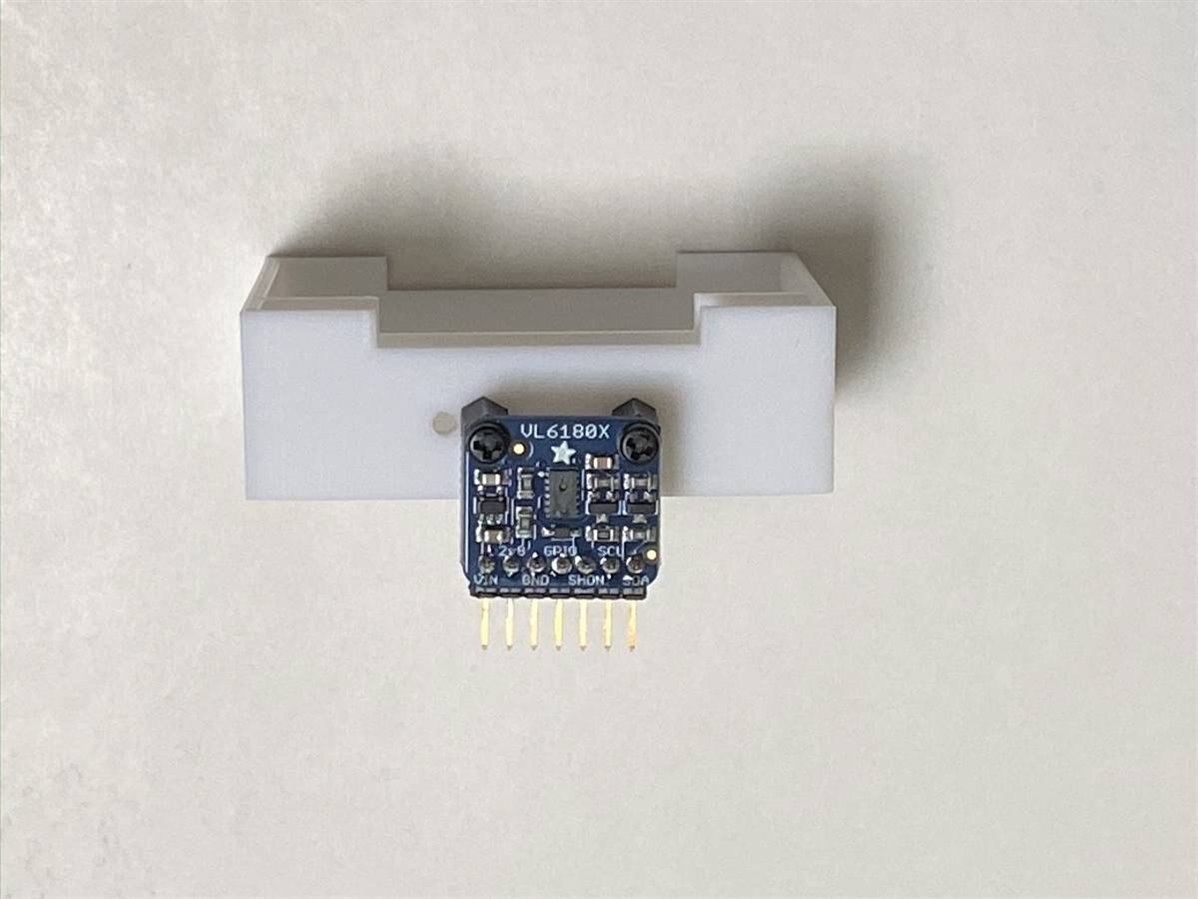
The next step in my project is to print a mounting fixture for the micro-LIDAR TOF sensor. I wanted to position the sensor lens in approximately the same plane as the laser lens. Any small discrepancies will be corrected when I calibrate the offset.
The shroud has a press fix onto the spindle/laser mount. The lower shelf holds the VL6180X and I picked standoffs of the appropriate length to adjust the sensor lens position.

Bottom view (the addition hole position allows me to mount the VL53L0X).
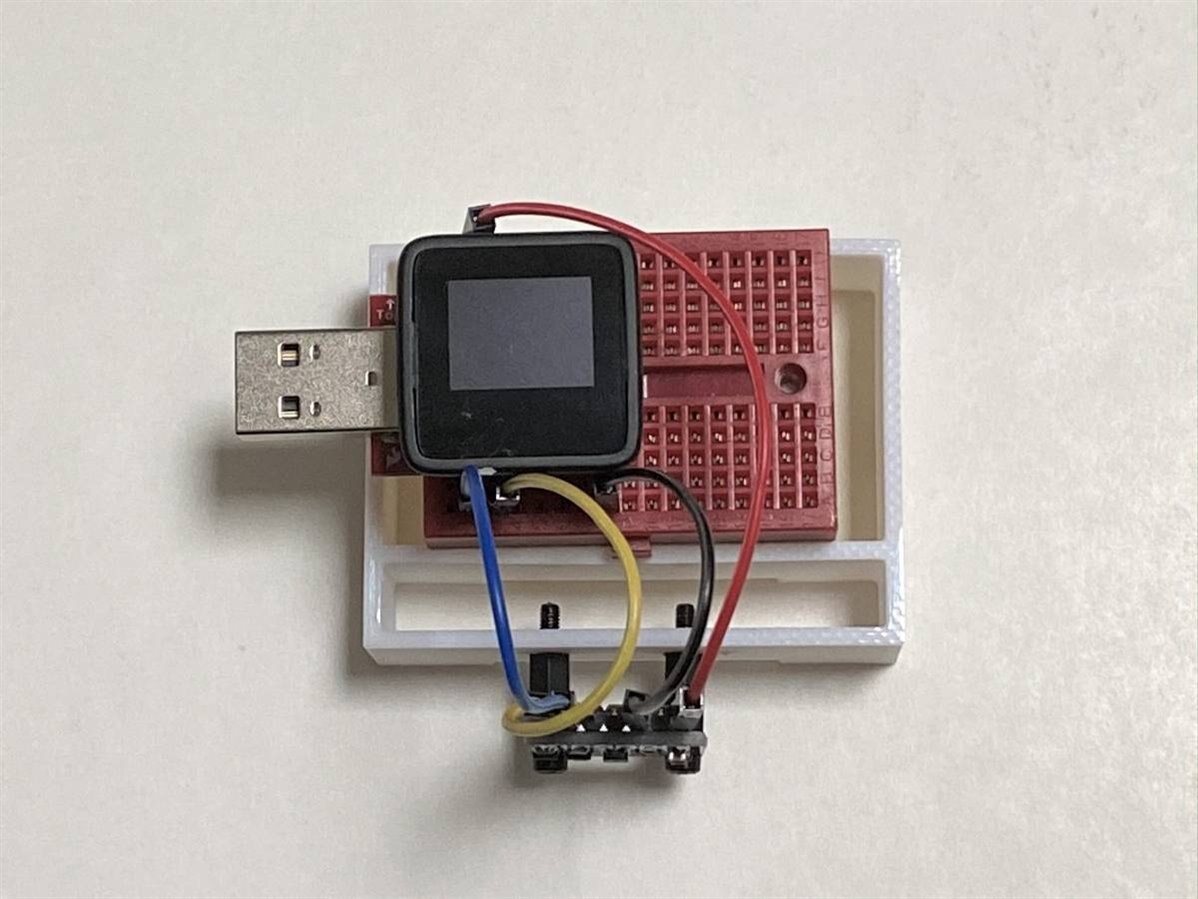
While I am prototyping I am just going to mount the solderless breadboard into the upper cavity. This allows me to continue using the USB programmer.

The assembly with sensor connections.
Mounted on the spindle/laser holder.
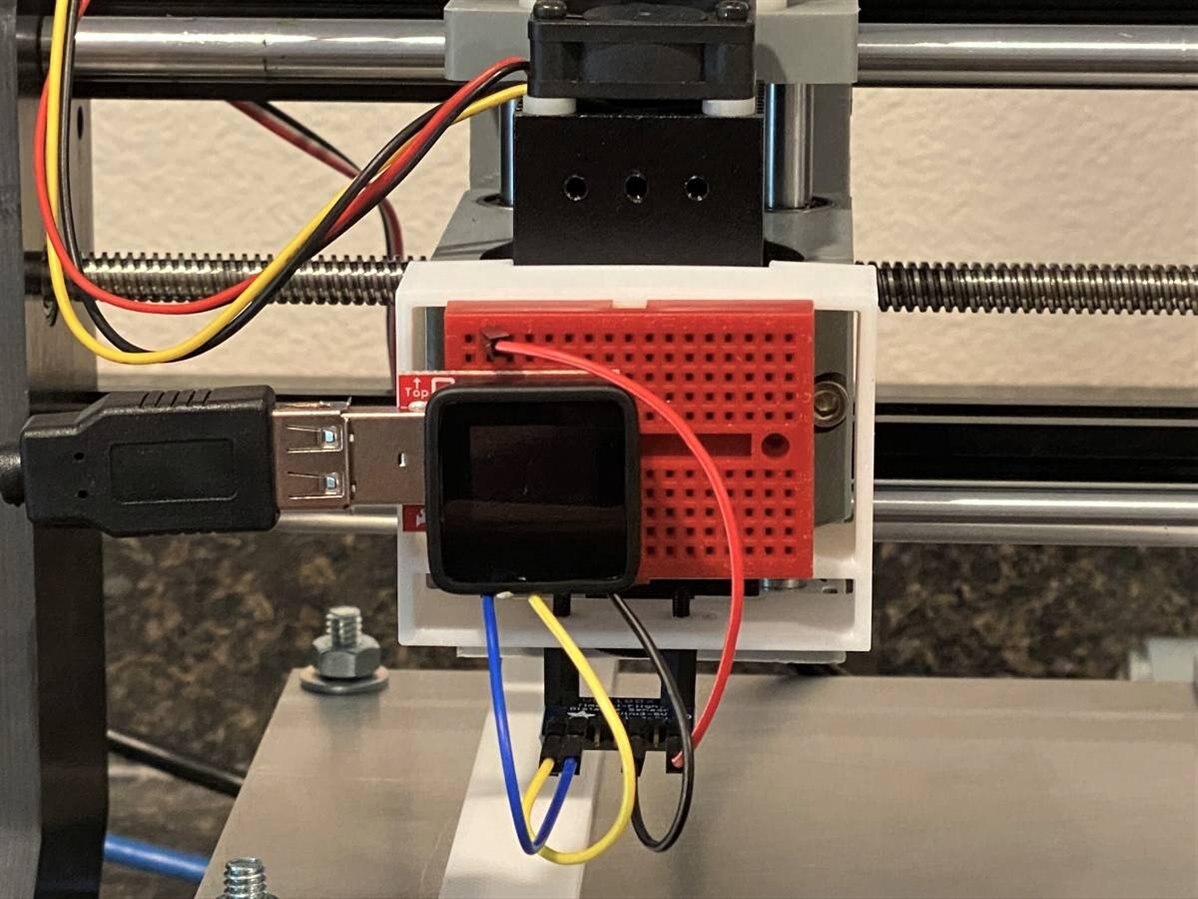
When I am done testing I will remove the USB programmer and mount the MicroView in a socket on a small proto PCB. I'll wire the power and ground from the GRBL controller. I also need to add the wire to the z-limit input of the GRBL controller.
The next step is to do the performance testing with the VL6180X using the averaging program. I decided to combine a few of the steps from the previous blog and just do all the integration/testing on the cnc/laser machine as I'll need to get wired to the GRBL controller and it's probably better to do the testing in the use environment.
Top Comments