


General description
The purpose of this project is to create an automated irrigation system based on an Arduino Uno and ESP-01. It will need to automatically detect when irrigation is required and if there is water in the reservoir so that irrigation can initiated. If the reservoir is empty, then an e-mail must be sent to inform of this so that the situation can be remedied. If irrigation is required and water is available (and all the safety requirements are met), then irrigation should be initiated.
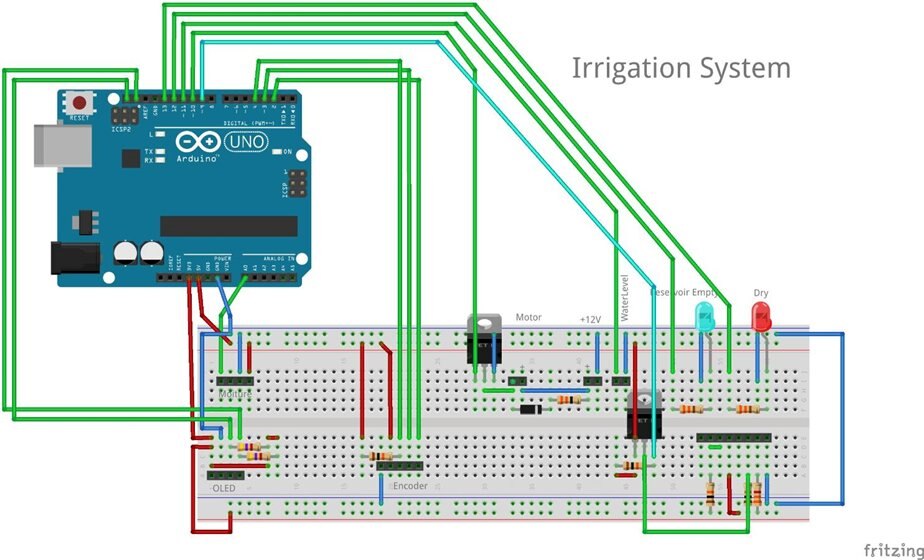
The system includes a soil hygrometer sensor for detecting the dryness of the soil, a water reservoir (a bucket of water), a water level switch for detecting if the water reservoir is empty, a peristaltic water pump used to irrigate the soil, and an OLED graphical display and a rotary encoder which are used to adjust humidity thresholds at which irrigation should be started and stopped.
As mentioned earlier, the system also includes a set of safety requirements which have to be met.
Project specification:
The main components of the system are:
- An Arduino Uno (hereafter referred to as “Uno”) which controls everything
- A 9V DC 1A power adapter for the Uno
- An ESP-01 WiFi module which is used to facilitate messaging
- A FC-28 soil hygrometer (moisture sensor) for detecting humidity in soil
- A water level switch NC mounted on a float for detecting when the water reservoir is empty
- A Keyes KY-040 rotary encoder is used to adjust threshold values used by the sketch
- A 0.96" 128 x 64 pixel OLED graphical display used to display status information
- A peristaltic water pump to pump water from the water reservoir to the soil
- A 12V DC 1A power adapter for the water pump
- A 10 gallon bucket of water (water reservoir)
- A potted plant to water
Operation:
The two sensors (soil hygrometer and water level switch) are connected to inputs of the Uno (A0 and D11 respectively) and the water pump is controlled by an output signal (D10) from the Uno. Two LED’s are controlled by output signals from the Uno and are used as status indicators:
- Red : (D13) Lit to indicate that the soil is dry enough to warrant watering
- Blue : (D12) Lit to indicate that the water reservoir is empty (requires a refill of water)
A 0.96" 128 x 64 piksel OLED graphical display is also used to display status information and to adjust threshold levels for turning the water pump on and off. It uses the Uno's I2C interface (A5(SCL) and A4(SDA)).
A Keyes KY-040 rotary encoder is used together with the OLED display to adjust the threshold values used by the script. It uses the D2 through D5 pins as input. The system goes into adjustment modus when the knob is depressed. The user can then scroll through the items which can be adjusted. The item to calibrate is choosen by depressing the switch once more when it displayed. This causes the system to display the current value being used for that item. The user can then increase the value by turning the knob clockwise (whereupon the displayed value increases) or counter clockwise (whereupon the displayed value decreases). To choose the displayed value the user must depress the knob - whereupon the system also exits adjustment mode and commenses to use the new values.
There are three criteria which all have to be met in order to turn on the pump (and water the plant):
- There must be water in the reservoir
- The soil moisture reading in the soil must be greater than a specified high threshold value (indicating the soil is too dry)
- A specified minimum amount of time must have elapsed since the pump was last turned off while watering (but not if this was due to entering adjustment modus).
Any one of the following criteria will cause the pump to be turned off:
- No water left in the water reservoir
- The moisture reading of the soil is lower than a specified low threshold value (indicating the soil has been irrigated sufficiently. This criteria also triggers the timer which keeps track of the amount of time that has elapsed since the pump was turned off).
- the pump has been on continually for at least MAX_PUMP_ON_TIME milliseconds.
- (only temporarily) entering adjustment mode
Basically, the Uno just goes in a loop checking the criteria above and taking action when necessary. Each loop iteration takes approximately 20-30 seconds to complete. If, however the knob of the rotary encoder is depressed and this is detected, the function for adjustment modus is called and normal operation is not resumed until after returning from the function. Before the adjustment function is called the water pump and on time timer are both stopped if the pump is on. Both are then resumed upon returning from the adjustment function.
Notes:
GPIO ESP_WATER_EMPTY is used to signal to the ESP-01 that the water reservoir is empty (via the GP0 pin of the ESP-01). The ESP-01 is configured to use its GPIO0 as an input. A LOW signal on this pin will trigger the sendMessage(FILL_RESERVOIR_URL) function on the ESP-01. This function invokes a PHP script on my Raspberry Pi server via a HTTP GET request. The parameter it uses indicates which script to invoke. This one (FILL_RESERVOIR_URL) results in an e-mail being sent to me informing me that the water reservoir is empty. The ESP-01 also calls this function with CONNECT_SUCCESS_URL as the parameter from its setup() function. The resulting e-mail informs me that the the ESP-01 has successfully connected to the WiFi and it also reminds me that any custom thresholds need to be re-entered (since this e-mail will only be sent whenever the ESP-01 restarts => the Uno has also been restarted.
Future features to implement:
- replace Uno with custom design (with ability to reprogram by attaching adequate IO interface)
Schematic:

Breadboard Layout:
ESP-01 Sketch:
/********************************************************************************************************
* Program for ESP-01 used in semi-automated irrigation system
* ===========================================================
*
* Summary:
* --------
*
* This sketch is used to sends emails by running appropriate PHP scripts (the URL parameter used)
* triggered via HTTP GET requests to a HOST.
*
* One script is triggered by the setup() function after
* the ESP-01 establishes a WiFi connection to MY_SSID. That e-mail informs the recipient that it has
* successfully established the WiFi connection and that the default threshold values are being used
* by the Arduino Uno to control the water pump.
*
* The other script is triggered by a LOW signal on the GPIO0 pin (which is configured as an input).
* The e-mail that this script sends informs the recipient that the water reservoir is empty. After
* triggering the script the sketch waits for PAUSE_AFTER_RESERVOIS_EMPTY_EMAIL_SENT before continuing.
*
* The sketch uses the onboard blue LED (GPIO2) to indicate status during the WiFi connection process.
* It flashes the LED until a connection is made. If no connection is made after MAX_CONNECT_ATTEMPTS
* it turns the LED on for 10 seconds before exiting the script.
*/
#include
const char* MY_SSID = "********"; // replace with the SSID you would like to connect to
const char* PASSWORD = "********"; // replace with the SSID password
IPAddress staticIP(192, 168, 1, 46); // replace with static IP address to use for ESP-01 device
IPAddress gateway(192, 168, 1, 1); // replace with gateway IP address for the SSID
IPAddress subnet(255, 255, 255, 0);
const int MAX_CONNECT_ATTEMPTS = 5; // maximum attempts to make to connect the ESP-01 to the wifi PA
const int MAX_WAIT_FOR_CONNECT_CYCLES = 40; // 2 cycles = approx. 1 sec
const unsigned long PAUSE_AFTER_RESERVOIS_EMPTY_EMAIL_SENT = 1000UL * 60UL * 60UL * 24UL; // one day
const String HOST = "192.168.1.45"; // replace with your server IP address
const int HTTP_PORT = 80;
const String FILL_RESERVOIR_URL = "/fillReservoir.php"; // script that sends me email warning that water reservoir is empty
const String CONNECT_SUCCESS_URL = "/connectSuccess.php"; // script that sends me email informing of successful wifi connect
const int RESERVOIR = 0; // IO pin to use as input for signalling that the the water reservori is empty (LOW => empty)
const int BLUE_LED = 2; // IO pin to use for blinking the blue onboard LED to signal status (HIGH => off)
int reservoirLevel = HIGH; // used to store water reservoir status (LOW => empty)
int ledStatus = HIGH; // used to store onboard blue LED status (HIGH => off)
bool wifiIsConnected = false; // used to store wifi connection status (false => not connected)
void setup() {
delay(10000); // long delay here to make sure signals have stabilized before continuing
Serial.begin(115200);
Serial.println();
delay(100);
pinMode(BLUE_LED, OUTPUT);
digitalWrite(BLUE_LED, ledStatus);
WiFi.mode(WIFI_STA); // configure ESP-01 to operate as a wifi station
wifiConnect();
for (int i = MAX_CONNECT_ATTEMPTS; i > 0; i--) {
if (wifiIsConnected = wifiConnect()) { // connected! => no need to continue trying to connect
break;
}
}
if (!wifiIsConnected) {
digitalWrite(BLUE_LED, LOW);
delay(10000);
exit(1);
}
delay(100);
sendMessage(CONNECT_SUCCESS_URL);
delay(500);
pinMode(RESERVOIR, INPUT);
delay(100);
}
void loop() {
if (LOW == (reservoirLevel = digitalRead(RESERVOIR))) {
sendMessage(FILL_RESERVOIR_URL);
delay(PAUSE_AFTER_RESERVOIS_EMPTY_EMAIL_SENT);
} else {
delay(5000);
}
}
void sendMessage(String URL) {
WiFiClient client;
if (!client.connect(HOST, HTTP_PORT)) {
//Serial.println("connection failed");
return;
}
client.print(String("GET ") + URL + " HTTP/1.1\r\n" +
"Host: " + HOST + "\r\n" +
"Connection: close\r\n\r\n");
delay(500);
}
bool wifiConnect() {
bool wifiConnected = false;
WiFi.begin(MY_SSID, PASSWORD, 13, ap_mac, true);
WiFi.config(staticIP, gateway, subnet);
for (int i = MAX_WAIT_FOR_CONNECT_CYCLES; i > 0 ; i--) { // wait for 20 seconds to be connected
Serial.print("Connection status: ");
Serial.println(WiFi.status());
if (wifiConnected = (WiFi.status() == 3)) { //WL_CONNECTED)) {
wifiConnected = true;
break;
}
delay(500);
if (ledStatus == HIGH) {
ledStatus = LOW;
} else {
ledStatus = HIGH;
}
digitalWrite(BLUE_LED, ledStatus);
}
ledStatus = HIGH;
digitalWrite(BLUE_LED, ledStatus);
WiFi.printDiag(Serial);
return wifiConnected;
}
Arduino Uno Sketch:
/**********************************************************************************************
* Program for semi-automated irrigation using Arduino Uno
* =======================================================
*
#include
#include
#include <adafruit_gfx.h>
#include <adafruit_ssd1306.h>
#define OLED_RESET 4
Adafruit_SSD1306 display(OLED_RESET);
#define NUMFLAKES 10
#define XPOS 0
#define YPOS 1
#define DELTAY 2
#define LOGO16_GLCD_HEIGHT 16
#define LOGO16_GLCD_WIDTH 16
#if (SSD1306_LCDHEIGHT != 32)
#error("Height incorrect, please fix Adafruit_SSD1306.h!");
#endif
//==============
// encoder stuff
//==============
#define ENCODER_CLK 2
#define ENCODER_DT 3
#define ENCODER_SW 4
int encoderCounter = 0;
int encoderClkState;
int encoderClkLastState;
int encoderSwLastState;
int encoderSwState;
int encoderPosition = 0;
// I/O
const int DRY_LED = 13; // (Output) used to indicate what pump status should be ON (set HIGH) when the pump should be on
const int PUMP = 10; // (Output) used to turn the pump on (set HIGH) and off (set LOW)
const int WATER_EMPTY_LED = 12; // (Output) used to indicate if the reservoir is empty (set HIGH => ON)
const int WATER_LEVEL = 11; // (Input) used to detect if there is water in the reservoir (HIGH) or if it is empty (LOW)
const int ESP_WATER_EMPTY = 9; // (Output) used to signal the ESP-01 that the water reservoir is empty (set LOW => empty)
// A0 : ADC (Analog Input) used to read soil humidity: high value => dry, low value => wet
// Max value is approx. 1018 - bone dry
// Min value is approx. 530 - drowning in water
const unsigned long MINIMUM_TIME = 1000UL * 60UL * 60UL * 24UL; // minimum time that must transpire between irrigation (1 day)
//const unsigned long MINIMUM_TIME = 60UL * 1000UL; // minimum time that must transpire between irrigation (only for testing)
const unsigned long MAX_PUMP_ON_TIME = 1000UL * 60UL * 15UL; // maximum time pump can be turned on for (15 minutes)
//const unsigned long MAX_PUMP_ON_TIME = 60UL * 1000UL; // maximum time pump can be turned on for (only for testing)
//==========
// VARIABLES
//==========
// timing
unsigned long lastIrrMillis = 0UL;
unsigned long currentMillis = 0UL;
unsigned long pumpOnMillis = 0UL;
// soil moisture reading
int pumpOnThresh = 200; // Turn on the pump when ADC input value >= this value
int pumpOffThresh = 190; // Turn off the pump when ADC input value <= this value (and do not trun on again for at least a day)
bool pumpIsOn = false;
int moisture = 800; // previous
int waterLevel;
//int tmpMoisture = 0; // new (temporary)
int displayLine = 0;
const int DISPLAY_LINE_INCREASE = 8;
const int DISPLAY_LINE_MAX = 32;
//======
// SETUP
//======
void setup() {
// initialize Serial
Serial.begin(9600);
delay(100);
Serial.println("Soil moisture sensor");
// initialize IO
pinMode(WATER_LEVEL, INPUT_PULLUP);
pinMode(PUMP, OUTPUT);
digitalWrite(PUMP, LOW);
pumpIsOn = false;
pinMode(DRY_LED, OUTPUT);
digitalWrite(DRY_LED, LOW);
pinMode(WATER_EMPTY_LED, OUTPUT);
digitalWrite(WATER_EMPTY_LED, LOW);
pinMode(ENCODER_CLK, INPUT);
pinMode(ENCODER_DT, INPUT);
pinMode(ENCODER_SW, INPUT);
// by default, we'll generate the high voltage from the 3.3v line internally! (neat!)
display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // initialize with the I2C addr 0x3C (for the 128x32)
// init done
display.setTextSize(1);
display.setTextColor(WHITE);
pinMode(ESP_WATER_EMPTY, OUTPUT);
digitalWrite(ESP_WATER_EMPTY, HIGH);
}
void loop() {
// rotary encoder stuff
encoderSwState = digitalRead(ENCODER_SW);
if ((encoderSwLastState == encoderSwState) and (encoderSwState == false)) {
unsigned long deltaTime;
if (pumpIsOn) {
deltaTime = millis() - pumpOnMillis;
digitalWrite(PUMP, LOW);
}
chooseMenu();
if (pumpIsOn) {
pumpOnMillis = millis() - deltaTime;
digitalWrite(PUMP, HIGH);
}
delay(1000);
}
//irrigation stuff
waterLevel = readInput(WATER_LEVEL); // read water level
if (waterLevel == LOW) { // water reservoir is empty
digitalWrite(PUMP, LOW); // turn off pump
pumpIsOn = false;
digitalWrite(WATER_EMPTY_LED, HIGH); // turn on LED indicator
digitalWrite(ESP_WATER_EMPTY, LOW); // signal ESP-01 to send e-mail informing water reservoir is empty
// Serial.println("The water reservoir is empty => fill it up!");
} else {
digitalWrite(WATER_EMPTY_LED, LOW); // turn off LED indicator
digitalWrite(ESP_WATER_EMPTY, HIGH); // signal ESP-01 that water reservoir contains water
}
moisture = analogRead(A0);
if (moisture >= pumpOnThresh) {
digitalWrite(DRY_LED, HIGH); // turn on LED indicator
if (pumpIsOn) {
currentMillis = millis();
if ((pumpOnMillis == 0) or ((currentMillis - pumpOnMillis) >= MAX_PUMP_ON_TIME) or (currentMillis < pumpOnMillis)) {
digitalWrite(PUMP, LOW); // turn pump off
pumpIsOn = false;
lastIrrMillis = millis();
}
} else { // pump is off
currentMillis = millis();
if ((lastIrrMillis == 0) or (currentMillis - lastIrrMillis >= MINIMUM_TIME)) {
if (waterLevel == HIGH) {
digitalWrite(PUMP, HIGH); // turn on pump
pumpIsOn = true;
pumpOnMillis = millis();
} else {
// Serial.println("but no water in reservoir!");
}
} else {
// Serial.println("but not enough time has passed since last irrigation.");
}
}
} else if (moisture <= pumpOffThresh) {
digitalWrite(DRY_LED, LOW); // turn off LED indicator
if (pumpIsOn) {
digitalWrite(PUMP, LOW); // turn off pump
pumpIsOn = false;
lastIrrMillis = millis(); // update lastIrrMillis in preparation for MINIMUM_TIME criteria calculation
} else {
// Serial.println("The soil moisture level is high and the water pump is already off.");
}
} else {
// Serial.println("The soil moisture level is adequate => no action needed.");
}
display.clearDisplay();
display.setCursor(0, 0);
display.print("PumpOnTres: ");
display.print(pumpOnThresh);
display.setCursor(0, 8);
display.print("Value: ");
display.print(moisture);
if (pumpIsOn) {
display.print(" (ON)");
} else {
display.print(" (OFF)");
}
display.setCursor(0, 16);
display.print("PumpOffTres: ");
display.print(pumpOffThresh);
display.setCursor(0, 24);
if (waterLevel == LOW) {
display.print("Bucket is empty.");
} else {
display.print("Bucket has water.");
}
display.display();
}
int readInput(int input) {
int millisStep = 20;
int reading;
for(int readings = 3; readings; readings--) {
reading = debounce(digitalRead(input));
delay(millisStep);
}
return reading;
}
int debounce (int SampleA) {
static int SampleB = 0;
static int SampleC = 0;
static int LastDebounceResult = 0;
LastDebounceResult = LastDebounceResult & (SampleA | SampleB | SampleC) | (SampleA & SampleB & SampleC);
SampleC = SampleB;
SampleB = SampleA;
return LastDebounceResult;
}
void chooseMenu() {
char* menu[] = {"Change PumpOnTres", "Change PumpOffTres"};
int menuLen = 2;
bool skipIt = true;
int pos = 0;
display.clearDisplay();
display.setCursor(0, 0);
display.print("Choose menu:");
display.setCursor(0, 8);
display.print(menu[pos]);
display.setCursor(0, 16);
display.print("press dial");
display.setCursor(0, 24);
display.print("to set.");
display.display();
delay(200);
// Reads the initial state of the ENCODER_SW
encoderSwLastState = false;
//delay(80);
encoderSwState = digitalRead(ENCODER_SW);
while (!((encoderSwLastState == encoderSwState) and (encoderSwState == false))) {
encoderSwLastState = encoderSwState;
encoderSwState = digitalRead(ENCODER_SW);
encoderClkState = digitalRead(ENCODER_CLK);
if (encoderClkState != encoderClkLastState) {
if (!skipIt) {
if (digitalRead(ENCODER_DT) != encoderClkState) {
pos++;
pos %= menuLen;
} else {
pos--;
if (pos < 0) {
pos = menuLen - 1;
}
}
display.clearDisplay();
display.setCursor(0, 0);
display.print("Choose menu:");
display.setCursor(0, 8);
display.print(menu[pos]);
display.setCursor(0, 16);
display.print("press dial");
display.setCursor(0, 24);
display.print("to set.");
display.display();
}
skipIt = !skipIt;
}
encoderClkLastState = encoderClkState;
}
display.clearDisplay();
display.setCursor(0, 0);
display.print("Choose menu:");
display.setCursor(0, 8);
display.print(menu[pos]);
display.setCursor(0, 16);
display.print("menu chosen.");
// display.setCursor(0, 24);
// display.print(onThresh);
display.display();
delay(1000);
if (pos == 0) {
pumpOnThresh = getEncoderData("PumpOnTres", pumpOnThresh);
} else if (pos == 1) {
pumpOffThresh = getEncoderData("PumpOffTres", pumpOffThresh);
// pumpOffThresh = setLowThresh();
}
}
int getEncoderData(char* theParam, int startPos) {
bool skipIt = true;
// int onThresh = pumpOnThresh;
display.clearDisplay();
display.setCursor(0, 0);
display.print("Change ");
display.print(theParam);
display.print(":");
display.setCursor(0, 8);
display.print(startPos);
display.setCursor(0, 16);
display.print("press dial");
display.setCursor(0, 24);
display.print("to set.");
display.display();
delay(200);
// Reads the initial state of the ENCODER_SW
encoderSwLastState = false;
encoderSwState = digitalRead(ENCODER_SW);
while (!((encoderSwLastState == encoderSwState) and (encoderSwState == false))) {
encoderSwLastState = encoderSwState;
encoderSwState = digitalRead(ENCODER_SW);
encoderClkState = digitalRead(ENCODER_CLK);
if (encoderClkState != encoderClkLastState) {
if (!skipIt) {
if (digitalRead(ENCODER_DT) != encoderClkState) {
if (startPos < 1023) {
startPos++;
}
} else {
if (startPos > 0) {
startPos--;
}
}
display.clearDisplay();
display.setCursor(0, 0);
display.print("Change ");
display.print(theParam);
display.print(":");
display.setCursor(0, 8);
display.print(startPos);
display.setCursor(0, 16);
display.print("press dial");
display.setCursor(0, 24);
display.print("to set.");
display.display();
}
skipIt = !skipIt;
}
encoderClkLastState = encoderClkState;
}
display.clearDisplay();
display.setCursor(0, 0);
display.print("Change ");
display.print(theParam);
display.print(":");
display.setCursor(0, 8);
display.print(startPos);
display.setCursor(0, 16);
display.print(theParam);
display.print(" set to");
display.setCursor(0, 24);
display.print(startPos);
display.display();
delay(1000);
return startPos;
}
Arduino Uno IO Pin Use:
D0: -
D1: -
D2:In ENCODER_CLK
D3:In ENCODER_DT
D4:In ENCODER_SW
D5: -
D6: -
D7: -
D8: -
D9:Out ESP_WATER_EMPTY LOW: Send e-mail informing that water reservoir is empty
D10:Out PUMP HIGH: ON - Turn water pump on
D11:In WATER_LEVEL HIGH: Water reservoir has water (this pin is also connected to GP0 of the ESP-01)
D12:Out WATER_EMPTY_LED HIGH: ON - Signal water reservoir is empty (Blue LED)
D13:Out DRY_LED HIGH: Lit - Signal pump should be on (Red LED)
A0:Analog In Soil hygrometer reading
A1: -
A2: -
A3: -
A4:SDA I2C (OLED display)
A5:SCL I2C (OLED display)

Top Comments
-

korn
-
Cancel
-
Vote Up
+3
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

urkraft
in reply to korn
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

korn
in reply to urkraft
-
Cancel
-
Vote Up
+3
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

urkraft
in reply to korn
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

urkraft
in reply to korn
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children