


first of all, i am truly sorry for delay in posting, as there is some shipment complexity and i only got my PYNQ-Z2 board first week of July. it is somewhat too short time to rush through everything
eventually over the last week , i manage to rush through it and i am posting the update here
Index
my first blog PYNQ-Z2 workshop -> after the first session
my second blog PYNQ Workshop 2
the workshops url (as references)
PYNQ-Z2 Workshop: Getting Up and Running with PYNQ (Win a $500 Gift Card for Your Embedded Vision Project!)
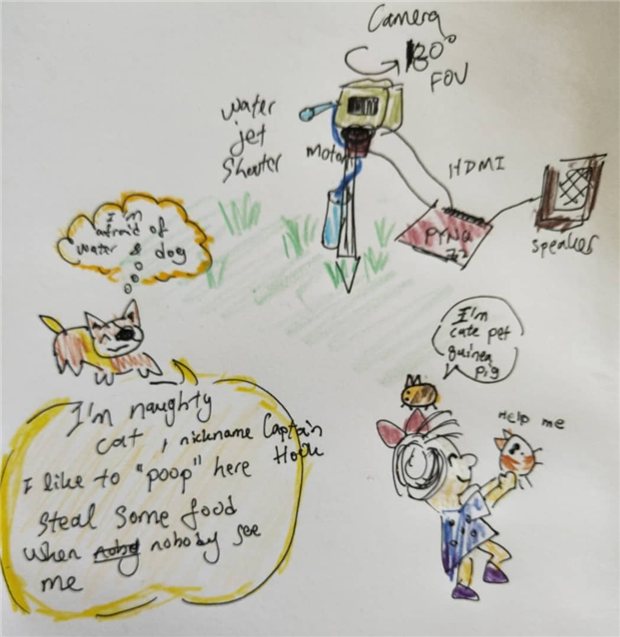
Overview of my project
a pynq-z2 powered device to shoot water jet to invader - Captain Hook, aka the few cats that roam my housing area
the camera will provide 180 degree field of view basically most of my garden, the water jet however can only shoot very short radius, so hopefully the "dog barking" still works.
it got to be able to differentiate between cat and the non target like myself, my children and their pet guinea pigs that are free roaming in the garden.
from the workshop, i plan to do:
i like to learn in doing my own custom overlay to control some IO >>> for motor, speaker, water jet (basically a motorized small pump)
i like to do opencv (and possibly running yolo deep learning) to recognize and track captain hook when it appear
pynq should helps with easier programming but to really do io i believe need do some custom overlay so that i can try to use some arduino shields and raspberry pi HAT i have
Chronicle
From the onset, i was made to know there will be shipment complexity of the PYNQ-Z2 board, but i try to do away with my other parts first, which are
BOM
dashcam -originally i plan to use Roku but after that dashcam seems a good choice.
360 degree turn table
Final
**************under construction ****************************