


So, if you've seen my comment on "Give New Life to Old Toys by Turning Them Into Techno Toys! ", then you know I'm trying to turn my old Fisher Price, pull-a-tune xylophone into an object avoiding, robot xylophone.


I took the advice of the people that replied to my idea and built an auto avoidance prototype first. I used one of my sons old remote control trucks that no longer worked by remote control.
Here is a picture of my prototype. (I'll try and upload some videos a little later).
For this prototype I used an old RC car, an Arduino Uno, ultrasonic rangefinder, and an L293 H-bridge. After I finally got the code worked out, it worked pretty well. It could be better of course. The range sensor is facing upward slightly so it will still bump into stuff every now and then because it sees it too late to stop. I haven't been coding long at all, but I was able to find several examples to point me in the right direction.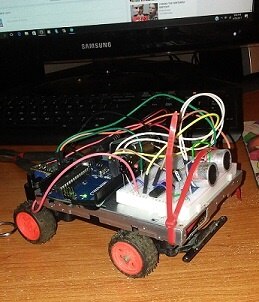
For my final build, I plan on using another of my sons dilapidated RC cars, (he's really rough on em), to power the xylophone. I think attaching motors to the existing axles will be too difficult because they are bent in a way that will allow them to control the hammers that strike the plates. So, I had originally thought about drilling new axle holes and making a new axle that I could attach my motors to, but I've scrapped that plan now too. Now I'm leaning toward attaching the axle and wheels from the RC car to the rear of the xylophone and having them push and pull it across the floor.
Kinda like this,
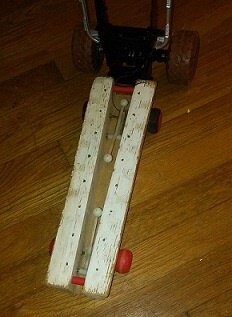
That leaves me with only one problem. How am I going to get this thing to turn? The RC car axle is fixed with one motor controlling both wheels simultaneously. So that's where I'm at with that.
If anyone has any tips or suggestions I'd be happy to hear them.
.......
Update #1
OK. As promised, here is the video of my prototype.
I've made some improvements to the prototype thus far. I mounted the range sensor to a servo so that it can look around and I modified the axle so that the two drive tires could be powered separately.
.......
Update #2
Alright, as embarrassing as this next video is, I'm still going to post it for the sake of transparency in my project.
The problem here is that my left wheel does not have as much torque as my right wheel after I modified the axle. So, I'm gonna have to open it back up and add gears, or 'recreate the wheel', no pun intended. I thought about using a different motor for the left wheel, but I barely fit the little motor that's in there now, so, I'm sure I don't have room for anything bigger.
Back to the drawing board.
DJ
Top Comments
-

beacon_dave
-
Cancel
-
Vote Up
+5
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

beacon_dave
-
Cancel
-
Vote Up
+5
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children