


THIS IS A TEST...........THIS IS A TEST...........
THIS IS A TEST...........
THIS IS A TEST...........
THIS IS A TEST...........
THIS IS A TEST...........
THIS IS A TEST...........
THIS IS A TEST...........
A TEST_BLOG to exercise the limits on the code block in the blog description Editor.
There seems to be a limit on the size of the code block!4
THIS SEEMS TO CAUSE THE BLOG TO GO INTO MODERATION
WHY!!!!
Code blocks are created from the insert/code option.
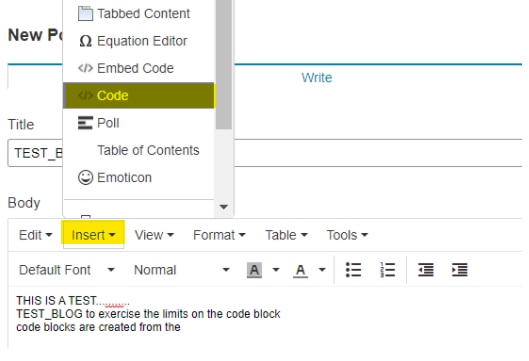
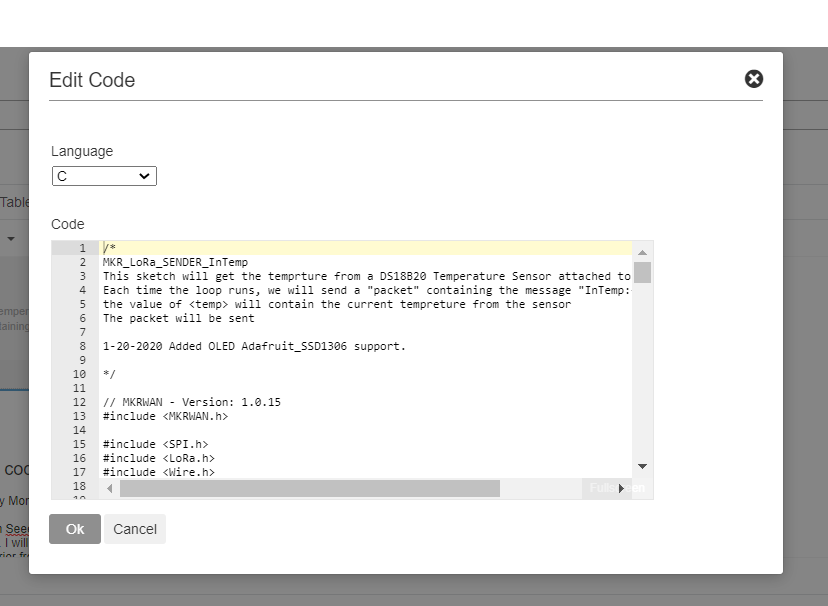
HERE IS AN EXAMPLE OF HOW IT LOOKS PUBLISHED.
CODE- MKR_LoRa_Sender_E2.ino
/*
MKR_LoRa_SENDER_InTemp
This sketch will get the temprture from a DS18B20 Temperature Sensor attached to the MKR WAN 1300
Each time the loop runs, we will send a "packet" containing the message "InTemp:<temp>
the value of <temp> will contain the current tempreture from the sensor
The packet will be sent
1-20-2020 Added OLED Adafruit_SSD1306 support.
*/
// MKRWAN - Version: 1.0.15
#include <MKRWAN.h>
#include <SPI.h>
#include <LoRa.h>
#include <Wire.h>
#include "rgb_lcd.h"
// Grove LCD DISPLAY
rgb_lcd lcd; //instantiate lcd Object
// Grove TEMPERATURE Sensor
const int pinTemp = A0; // pin of temperature sensor
float temperature;
float TempF; // tempreture in ferienheight
int B=3975; // B value of the thermistor
float resistance;
//Grove WATER Sensor
#define WATER_SENSOR 2
String WaterStatus;
// Grove Dust Sensor
int pin = 4;
unsigned long duration;
unsigned long starttime;
unsigned long sampletime_ms = 30000;//sampe 30s ;
unsigned long lowpulseoccupancy = 0;
float ratio = 0;
float concentration = 0;
float DustStatus;
//DISPLAY STRING
void Display(String title,String message){
// display title and message on the LCD display
// Put title on the 1st line
// put message on the 2nd line
//DISPLAY TITLE
// set the cursor to (0,0):
lcd.setCursor(0, 0);
lcd.print(title);
lcd.print(" . . . . . . . .");
delay(2000);
//DISPLAY MESSAGE - on a scrolling message on the 2nd line
// set the cursor to (16,1):
lcd.setCursor(16,1);
// set the display to automatically scroll:
lcd.autoscroll();
lcd.print(message);
delay(2000);
//CLEAN UP
// turn off automatic scrolling
lcd.noAutoscroll();
// clear screen for the next Message
lcd.clear();
}
void setup() {
// Grove LCD DISPLAY SECTION
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// LoRa INIT SECTION
//SHUT OFF SERIAL
// Serial.begin(9600);
// Serial.println("LoRa Sender");
Display("LoRa Sender","Started...");
if (!LoRa.begin(915E6)) {
while(1){
//SHUT OFF SERIAL
Serial.println("Starting LoRa failed!");
Display("Starting LoRa ","failed!");
}
}
//Grove TEMPERATURE
pinMode(A0,INPUT); //Setting the A0 pin as input pin to take data from the temperature sensor
//Grove WATER Sensor
pinMode(WATER_SENSOR, INPUT);
// Grove Dust Sensor
pinMode(pin,INPUT);
starttime = millis();//get the current time;
}
// SEND LORA PACKET
void SendPacket(String type, String value){
String tuple;
tuple = String(type) + String(value);
//display the packet contents
Display("Sending packet: ", tuple );
//Display(type);
//Display(value);
// send packet
LoRa.beginPacket();
LoRa.print(type);
LoRa.print(value);
LoRa.endPacket();
}
//GET THE WATER DETECT VALUE WET/DRY 0/1
String GetWaterStatus(){
String stat;
int val;
val = digitalRead(WATER_SENSOR);
if (val == 0){
stat = "WET";
}
if (val == 1){
stat = "DRY";
}
// if ((val != 0) || (val != 1) ){
// stat = "Water Sensor ERROR";
// }
return stat;
}
//GET DUST PARTICLE CONCENTRATION
float GetDustParticle(){
bool finished = false;
do{
duration = pulseIn(pin, LOW);
lowpulseoccupancy = lowpulseoccupancy+duration;
if ((millis()-starttime) > sampletime_ms)//if the sampel time == 30s
{
ratio = lowpulseoccupancy/(sampletime_ms*10.0); // Integer percentage 0=>100
concentration = 1.1*pow(ratio,3)-3.8*pow(ratio,2)+520*ratio+0.62; // using spec sheet curve
if (lowpulseoccupancy > 0)
{
Serial.print(lowpulseoccupancy);
Serial.print(",");
Serial.print(ratio);
Serial.print(",");
Serial.println(concentration);
}
lowpulseoccupancy = 0;
starttime = millis();
finished = true;
}
} while (!finished);
return concentration;
}
//GET THE CURRENT Grove Sensor TEMPERATURE
float GetTemp(){
int val = analogRead(pinTemp); // get analog value
resistance=(float)(1023-val)*10000/val; // get resistance
temperature=1/(log(resistance/10000)/B+1/298.15)-273.15; // calc temperature in celsius
TempF = (temperature * 9/5) + 32; // calc temp in ferenheight
return TempF;
}
void loop() {
//get the current Temperature
TempF = GetTemp();
//SEND THE PACKET
SendPacket("Temp:",String(TempF));
//get the water status
WaterStatus = GetWaterStatus();
SendPacket("Water:",WaterStatus);
// get the dust particle status - Concentration
DustStatus = GetDustParticle();
SendPacket("Dust:",String(DustStatus));
//delay(5000);
}
What Follows is a blog that has 3 code blocks:
BLOG#5 Testing Part 2 (Case Enclosure Reliability Monitor)
Test#2 - Enclosure 155H2GYCL Test Design
For this Test, I purchased two Grove Sensors from Seeed and used two of sensors from the supplied Grove starter Kit.
This is my 2nd Test, using a Hammond Enclosure. I will be testing the Ingress Protection Rating: of IP68 on the enclosure model:155H2CYCL.
I also purchased the Arduino MKR Connector Carrier from the Arduino Store, for this test
I'm utilizing the provided Arduino MKR WAN 1300 boards supplied by Hammond Manufacturing for the Design Challenge: Just Encase.
TEST# 2 - Measure the Environment within the Waterproof Enclosure 1554H2GYCL

-
Description
- For this Test, I purchased two Grove Sensors from Seeed and used two of sensors from the supplied Grove starter Kit.
- I also purchased the Arduino MKR Connector Carrier from the Arduino Store. This is used to attach the sender MKR1 from the previous test and attach the groove sensor connectors.
- The List of components used in this test:
- Arduino MKR Connector Carrier

- The Arduino MKR CONNECTOR CARRIER provides Seeed Studio's Grove connectors to your MKR board.
- This shield can allow you to build applications with different IoT connectivity's by simply changing the MKR board and with almost no changes to the code.
- BUY it from the Arduino Store
- Grove - Dust Sensor(PPD42NS)SKU 101020012

- This Dust Sensor gives a good indication of the air quality in an environment by measuring the dust concentration.
- The Particulate Matter level (PM level) in the air is measured by counting the Low Pulse Occupancy time (LPO time) in a given time unit. LPO time is proportional to PM concentration. This sensor can provide reliable data for air purifier systems; it is responsive to PM of diameter 1μm.
- Buy it from Seeed
- Grove - Water Sensor SKU 101020018

- Grove - Water Sensor detects the presence of water using exposed PCB traces.
- The sensor is made up of interlaced traces of Ground and Sensor signals.
- The sensor traces are weakly pulled up using 1 MΩ resistor.
- The resistor will pull the sensor trace value high until a drop of water shorts the sensor trace to the ground trace.
- USB Ruggedized Charger for Power

- The AdventureMax 10000mAh by MyCharge
- splash resistant
- drop resistant
- dirt-proof
- II had this charger lying around the house. I decided to use it to power the MKR WAN 1300.
- Grove - Starter Kit Sensors
- Grove - LCD RGB Backlight
- The Grove - LCD RGB Backlight supports text display, using user-defined characters. It enables you to set the backlight color, using the simple and concise Grove interface. It uses I2C as the communication method with your Arduino.
- This is a 16x2 LCD screen.
- It is capable of displaying two rows of sixteen-character texts, supporting languages such as English and Japanese.
- Grove – Temperature Sensor
 the Grove - Temperature Sensor uses a thermistor which returns the ambient temperature
the Grove - Temperature Sensor uses a thermistor which returns the ambient temperature .
.- The board then converts this voltage value measured by an analog input pin to a temperature.
- The operating range is -40 to 125 degrees Celsius.
- Wiki] Grove - Temperature Sensor
- Grove - LCD RGB Backlight
- Arduino MKR Connector Carrier
-
Wiring Diagram
- All the sensors mentioned in the previous section are connected to the Arduino Connector Carrier with a Groove Cable connected to the designated connectors.
- One end of the cable is attached to the Grove sensor and the other to the Grove connector on the Carrier.
- The LCD Display is attached to the TWI ()I2C) connector
- The TEMPRATURE sensor is attached to the analog A0 connector.
- The DUST sensor is attached to the digital D4 connector
- The WATER sensor is attached to the digital D2 connector
- The Arduino MKRWAN 1300 Is attached to the Connector Carrier in the relation shown below
- For POWER, the AdventureMax 10000mAh is attached to the USB connector on the MKRWAN 1300
- The LoRa Antenna is attached to the antenna connector on the MKRWAN 1300
- BLOCK DIGARAM
- Here is a diagram of components:
- THE BUILD
- Carrier Connector and the Attached components
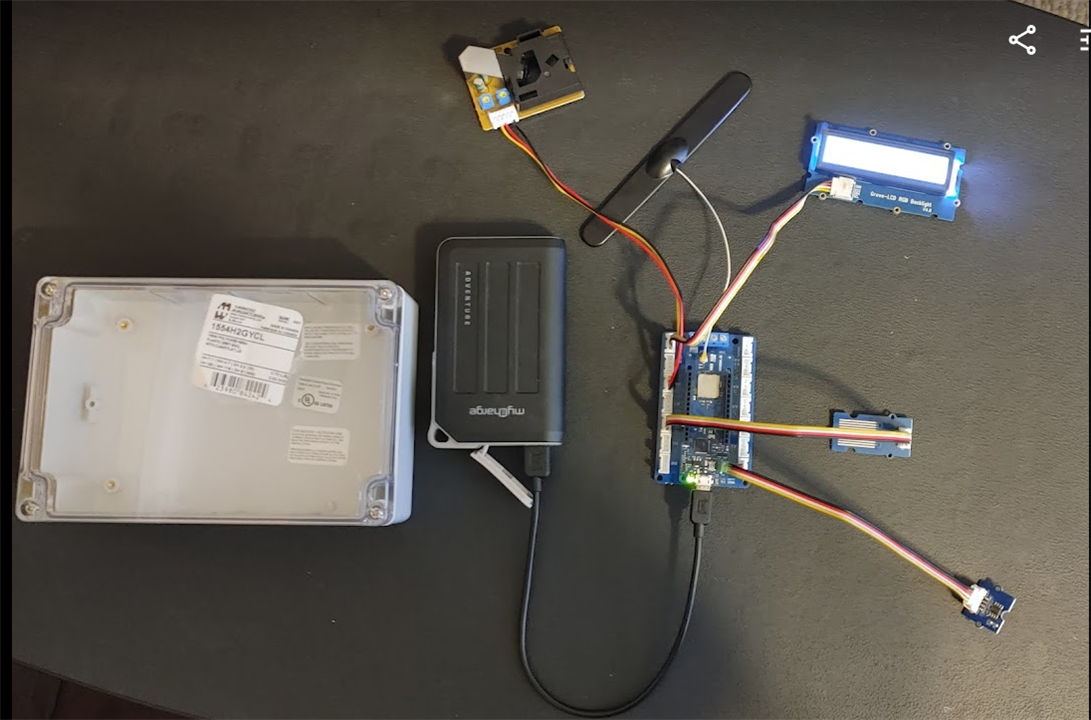
- Carrier Connector and the Attached components
- Here is a diagram of components:

SOFTWARE DESIGN
Libraries
- rgb_lcd.h
- used for the LCD
- README.md
- MKRWAN.h
- used for Lora communications .
- Installed by the Arduino IDE Library Manger
- LoRa.h
- the library used for sending and receiving data using LoRa radios.
- GitHub - sandeepmistry/arduino-LoRa: An Arduino library for sending and receiving data using LoRa radios.
- Wire.h
- This library allows you to communicate with I2C / TWI devices.
- It is needed by the Grove LCD Display
Arduino Sketches
- Three MCU"s, Three Sketches to get the the data through.
- The next Three section will describe the 3 sketches used to get the data thru and onto the Arduino IoT cloud.
LoRa SENDER - MKR_LoRa_Sender_E2.ino on MKR1
- This sketch is Uploaded to the MKR1 board in my design.
- This Sketch, will be used to transmit LoRaWAN packets to the MKR2 LoRa Receiver board.
- As described in the Design section above it will have 3 Grove sensors and 1 Grove LCD display connected to the Arduino MKR Connector Carrier.
- a MKR WN 1300 (MKR1) is attached to the Carrier.
- one by one, each sensor is read.
- after each sensor is read, a LoRa a packet with the sensor value is sent
- In the packet send function the value is displayed on the LCD display.
CODE- MKR_LoRa_Sender_E2.ino
/*
MKR_LoRa_SENDER_InTemp
This sketch will get the temprture from a DS18B20 Temperature Sensor attached to the MKR WAN 1300
Each time the loop runs, we will send a "packet" containing the message "InTemp:<temp>
the value of <temp> will contain the current tempreture from the sensor
The packet will be sent
1-20-2020 Added OLED Adafruit_SSD1306 support.
*/
// MKRWAN - Version: 1.0.15
#include <MKRWAN.h>
#include <SPI.h>
#include <LoRa.h>
#include <Wire.h>
#include "rgb_lcd.h"
// Grove LCD DISPLAY
rgb_lcd lcd; //instantiate lcd Object
// Grove TEMPERATURE Sensor
const int pinTemp = A0; // pin of temperature sensor
float temperature;
float TempF; // tempreture in ferienheight
int B=3975; // B value of the thermistor
float resistance;
//Grove WATER Sensor
#define WATER_SENSOR 2
String WaterStatus;
// Grove Dust Sensor
int pin = 4;
unsigned long duration;
unsigned long starttime;
unsigned long sampletime_ms = 30000;//sampe 30s ;
unsigned long lowpulseoccupancy = 0;
float ratio = 0;
float concentration = 0;
float DustStatus;
//DISPLAY STRING
void Display(String title,String message){
// display title and message on the LCD display
// Put title on the 1st line
// put message on the 2nd line
//DISPLAY TITLE
// set the cursor to (0,0):
lcd.setCursor(0, 0);
lcd.print(title);
lcd.print(" . . . . . . . .");
delay(2000);
//DISPLAY MESSAGE - on a scrolling message on the 2nd line
// set the cursor to (16,1):
lcd.setCursor(16,1);
// set the display to automatically scroll:
lcd.autoscroll();
lcd.print(message);
delay(2000);
//CLEAN UP
// turn off automatic scrolling
lcd.noAutoscroll();
// clear screen for the next Message
lcd.clear();
}
void setup() {
// Grove LCD DISPLAY SECTION
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
// LoRa INIT SECTION
//SHUT OFF SERIAL
// Serial.begin(9600);
// Serial.println("LoRa Sender");
Display("LoRa Sender","Started...");
if (!LoRa.begin(915E6)) {
while(1){
//SHUT OFF SERIAL
Serial.println("Starting LoRa failed!");
Display("Starting LoRa ","failed!");
}
}
//Grove TEMPERATURE
pinMode(A0,INPUT); //Setting the A0 pin as input pin to take data from the temperature sensor
//Grove WATER Sensor
pinMode(WATER_SENSOR, INPUT);
// Grove Dust Sensor
pinMode(pin,INPUT);
starttime = millis();//get the current time;
}
// SEND LORA PACKET
void SendPacket(String type, String value){
String tuple;
tuple = String(type) + String(value);
//display the packet contents
Display("Sending packet: ", tuple );
//Display(type);
//Display(value);
// send packet
LoRa.beginPacket();
LoRa.print(type);
LoRa.print(value);
LoRa.endPacket();
}
//GET THE WATER DETECT VALUE WET/DRY 0/1
String GetWaterStatus(){
String stat;
int val;
val = digitalRead(WATER_SENSOR);
if (val == 0){
stat = "WET";
}
if (val == 1){
stat = "DRY";
}
// if ((val != 0) || (val != 1) ){
// stat = "Water Sensor ERROR";
// }
return stat;
}
//GET DUST PARTICLE CONCENTRATION
float GetDustParticle(){
bool finished = false;
do{
duration = pulseIn(pin, LOW);
lowpulseoccupancy = lowpulseoccupancy+duration;
if ((millis()-starttime) > sampletime_ms)//if the sampel time == 30s
{
ratio = lowpulseoccupancy/(sampletime_ms*10.0); // Integer percentage 0=>100
concentration = 1.1*pow(ratio,3)-3.8*pow(ratio,2)+520*ratio+0.62; // using spec sheet curve
if (lowpulseoccupancy > 0)
{
Serial.print(lowpulseoccupancy);
Serial.print(",");
Serial.print(ratio);
Serial.print(",");
Serial.println(concentration);
}
lowpulseoccupancy = 0;
starttime = millis();
finished = true;
}
} while (!finished);
return concentration;
}
//GET THE CURRENT Grove Sensor TEMPERATURE
float GetTemp(){
int val = analogRead(pinTemp); // get analog value
resistance=(float)(1023-val)*10000/val; // get resistance
temperature=1/(log(resistance/10000)/B+1/298.15)-273.15; // calc temperature in celsius
TempF = (temperature * 9/5) + 32; // calc temp in ferenheight
return TempF;
}
void loop() {
//get the current Temperature
TempF = GetTemp();
//SEND THE PACKET
SendPacket("Temp:",String(TempF));
//get the water status
WaterStatus = GetWaterStatus();
SendPacket("Water:",WaterStatus);
// get the dust particle status - Concentration
DustStatus = GetDustParticle();
SendPacket("Dust:",String(DustStatus));
//delay(5000);
}
LoRa Receiver - MKR_LoRa_Reeiver_UnitTest.ino on MKR2
- This Sketch, will be used to receive LoRaWAN packets.
- It is the same code that I used in Test#1, but I have included here for brevity
- The packets will contain telemetry data that will be sent over a serial line to the Nano 33 IoT.
CODE - MKR_LoRa_Reeiver_UnitTest.ino
/*
MKR_LoRa_Receiver
we will not be creating any packets. Instead, we will listen to incoming ones.
1-20-2020 Added OLED Adafruit_SSD1306 support.
*/
// MKRWAN - Version: 1.0.15
#include <MKRWAN.h>
#include <SPI.h>
#include <LoRa.h>
// Include Adafruit Graphics & OLED libraries
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
// CODE for MKR WAN 1300
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 32 // OLED display height, in pixels
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
#define OLED_RESET 4 // Reset pin # (or -1 if sharing Arduino reset pin)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
String inputString = ""; // a String to hold incoming data
void setup() {
Serial.begin(9600);
Serial1.begin(9600);
while (!Serial);
Serial.println("LoRa Receiver");
if (!LoRa.begin((915E6))) {
Serial.println("Starting LoRa failed!");
while (1);
}
// reserve 200 bytes for the inputString:
inputString.reserve(200);
//OLED CODE
// Start Wire library for I2C
Wire.begin();
// initialize OLED with I2C addr 0x3C
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
}
// OLED DISPLAY FUNCTION to display numbers.
void displayValues(String v){
// Delay to allow sensor to stabalize
delay(2000);
// Clear the display
display.clearDisplay();
//Set the color - always use white despite actual display color
display.setTextColor(WHITE);
//Set the font size
display.setTextSize(1);
//Set the cursor coordinates
display.setCursor(25,0);
display.print("Rcvd Packet");
display.setCursor(33,12);
display.setTextSize(3);
display.print(v);
}
void loop() {
// try to parse packet
int packetSize = LoRa.parsePacket();
if (packetSize) {
// received a packet
Serial.print("Received packet '");
// read packet
while (LoRa.available()) {
//Serial.print((char)LoRa.read());
// get the new byte:
char inChar = (char)LoRa.read();
// add it to the inputString:
inputString += inChar;
}
// display on OLED
displayValues(inputString);
display.display();
Serial.print(inputString);
Serial1.print(inputString);
Serial1.print('\n');
// print RSSI of packet
Serial.print("' with RSSI ");
Serial.print(LoRa.packetRssi());
Serial.println("");
inputString = "";
}
}
Sending Data to the Arduino IoT Cloud
- This sketch sends data to the IoT Cloud Dashboard
- It runs on the Nano 33 IoT board and connects via a WiFi connection.
- The sketch, is Auto Generated when you initially create a thing connected to a device on the Arduino IoT cloud
- NOTE: the Nano board script is generated automatically when creating a new Thing on the Arduino IoT cloud as described in the online tutorial
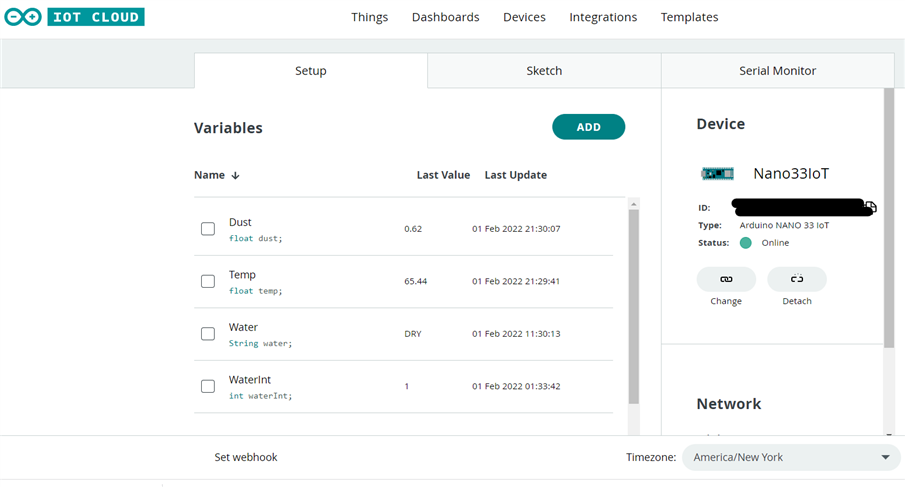
- Here is my Thing on the Arduino Cloud with the variables defined.
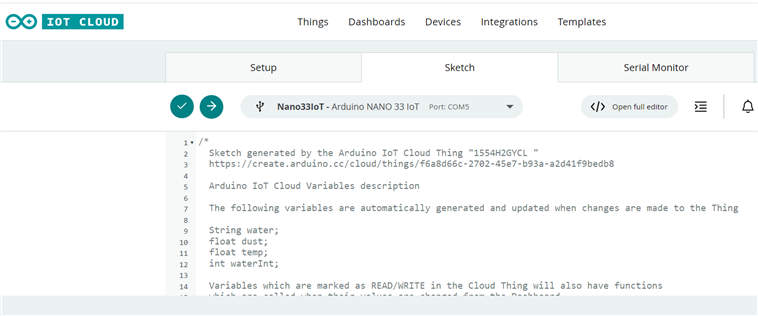
- The sketch is generated on the sketch Tab as described below.
- Here is a screenshot of the sketch generated to send data to the thing that I created on the IoT cloud.
- I then added my code to this sketch to receive serial data, parse the packet to extract the value and set the value to the proper variable
- The variable is then sent to the Thing and onto the Dashboard.
- Here is the entire sketch that will run on the Nano 33 IoT:
/* Sketch generated by the Arduino IoT Cloud Thing "1554H2GYCL " https://create.arduino.cc/cloud/things/f6a8d66c-2702-45e7-b93a-a2d41f9bedb8 Arduino IoT Cloud Variables description The following variables are automatically generated and updated when changes are made to the Thing String water; float dust; float temp; int waterInt; Variables which are marked as READ/WRITE in the Cloud Thing will also have functions which are called when their values are changed from the Dashboard. These functions are generated with the Thing and added at the end of this sketch. */ #include "thingProperties.h" String inputString = ""; // a String to hold incoming data bool stringComplete = false; // whether the string is complete float retFloat(String stringOne) { // Given a tuple pair in the form varname:value ex. inTemp:1.1 // return a float value to the right of the colon character //Serial.println(stringOne); int firstClosingBracket = stringOne.indexOf(':'); String value = String(stringOne.substring(firstClosingBracket+1)); //Serial.println(value); float val = value.toFloat(); return val; } String retString(String stringOne) { // Given a tuple pair in the form varname:value ex. inTemp:1.1 // return a int value to the right of the colon character //Serial.println(stringOne); int firstClosingBracket = stringOne.indexOf(':'); String value = stringOne.substring(firstClosingBracket+1); //Serial.println(value); //float val = value.toInt(); return value; } String getType(String stringOne){ int colon = stringOne.indexOf(':'); String value = stringOne.substring(0,colon); //Serial.println(value); return value; } void setup() { // Initialize serial and wait for port to open: Serial.begin(9600); Serial1.begin(9600); // This delay gives the chance to wait for a Serial Monitor without blocking if none is found delay(1500); // Defined in thingProperties.h initProperties(); // Connect to Arduino IoT Cloud ArduinoCloud.begin(ArduinoIoTPreferredConnection); //delay(3000); /* The following function allows you to obtain more information related to the state of network and IoT Cloud connection and errors the higher number the more granular information you’ll get. The default is 0 (only errors). Maximum is 4 */ setDebugMessageLevel(2); ArduinoCloud.printDebugInfo(); } void loop() { ArduinoCloud.update(); // Your code here // use the string when a newline arrives: if (stringComplete) { Serial.print("received on RX PIN:"); Serial.print(inputString); //USE THE InputString HERE // get the type of var String type = getType(inputString); if(type == "Temp"){ temp = retFloat(inputString); Serial.print("Sending value = "); Serial.println(temp); } if(type == "Dust"){ dust = retFloat(inputString); Serial.print("Sending value = "); Serial.println(dust); } if(type == "Water"){ water = retString(inputString); if (water == "WET\n"){ waterInt = 0; } if (water == "DRY\n"){ waterInt = 1; } Serial.print("Sending value = "); Serial.print(water); Serial.println(waterInt); } inputString = ""; stringComplete = false; } //At the very end of the loop check for serial data serialEvent(); } /* SerialEvent occurs whenever a new data comes in the hardware serial RX. This routine is run between each time loop() runs, so using delay inside loop can delay response. Multiple bytes of data may be available. */ void serialEvent() { while (Serial1.available()) { // get the new byte: char inChar = (char)Serial1.read(); // add it to the inputString: inputString += inChar; // if the incoming character is a newline, set a flag so the main loop can // do something about it: if (inChar == '\n') { stringComplete = true; } } } /* Since Temp is READ_WRITE variable, onTempChange() is executed every time a new value is received from IoT Cloud. */ void onTempChange() { // Add your code here to act upon Temp change } /* Since Water is READ_WRITE variable, onWaterChange() is executed every time a new value is received from IoT Cloud. */ void onWaterChange() { // Add your code here to act upon Water change } /* Since WaterInt is READ_WRITE variable, onWaterIntChange() is executed every time a new value is received from IoT Cloud. */ void onWaterIntChange() { // Add your code here to act upon WaterInt change } /* Since Dust is READ_WRITE variable, onDustChange() is executed every time a new value is received from IoT Cloud. */ void onDustChange() { // Add your code here to act upon Dust change }
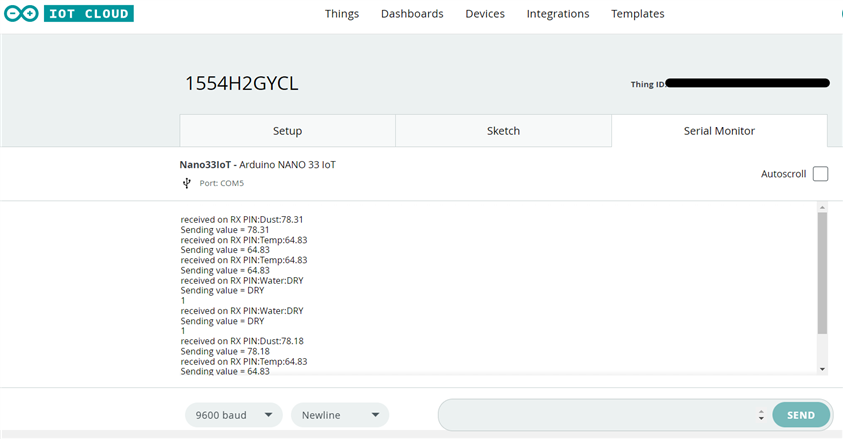
- Here is a screenshot of the Serial Monitor tab on the Arduino CLoud showing the Serial.print() calls in the program running on the Nano 33 IoT.
- And Finally, here is the dashboard showing the Variables.
- On the Phone

- On the Phone
| <<< PREVIOUS BLOG | NEXT BLOG >>> |
|---|---|
| Addendum BLOG A Testing |
Top Comments