First of all, I am new here and I just got my masters degree with the help of what I am going to present. I am not an engineer, I am a programmer loving to make stuff and develop programs on the things I make or purchase. I don't have a personal blog, nor a web page, at least not for the time being so I will describe here my latest project for Let's Get Portable! Contest.
In this post I will introduce the robot I have build, with its components and features. Then, I will describe the applications I have developed for this robot, followed by the future plans I have in mind for it. I will post pictures and videos for better understanding, and I will update this blog with the future results.
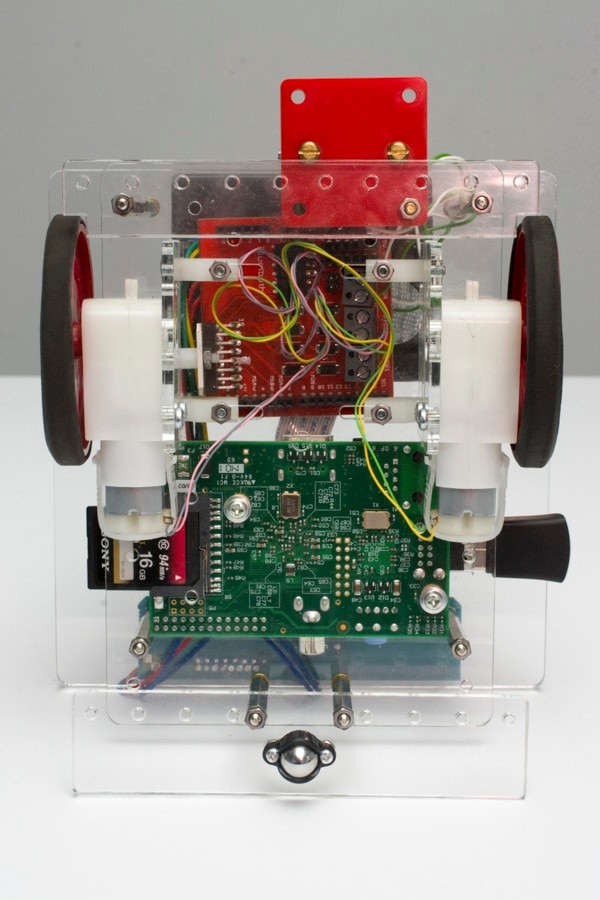
So, this is the robot:

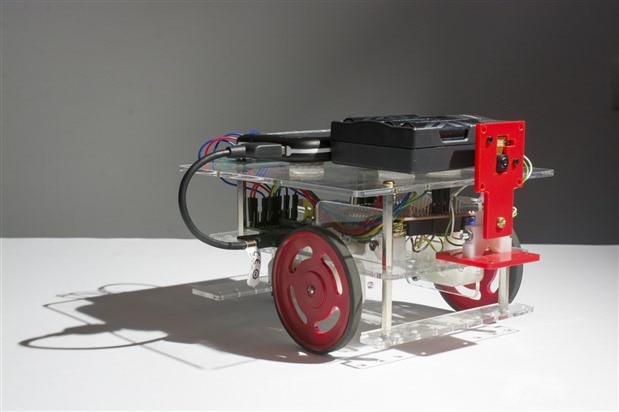
I built it from this:

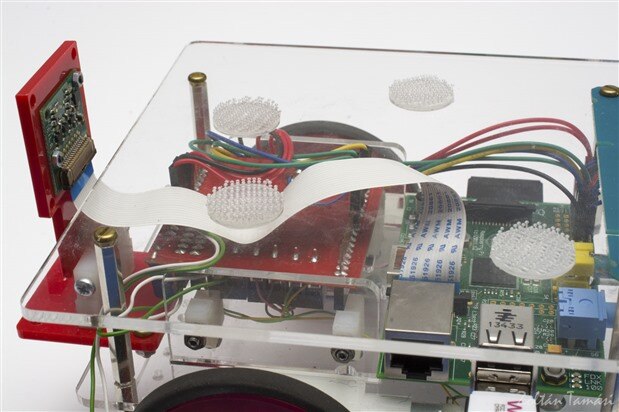
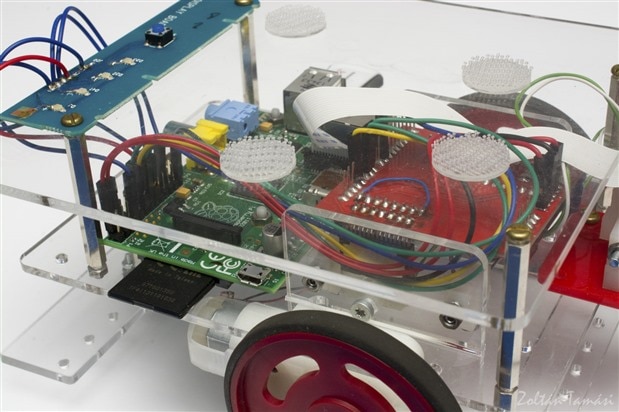
In the image above, you can see that I used a Raspberry Pi Version B, Revision 2.0, made in UK, a Raspberry Pi cam with a red support for it, a WI-Pi, module, two simple, low cost engines with two, red, wheels, a dual full bridge driver with L298N integrated monolithic circuit, an external, 3500 mA battery and some plates for the structure of the robot. I thought I would need an Ardoino Uno also, but I didn't used it after all. Later on, I added 4 batteries for the driver and the two engines, and a chip taken from an UPS, containing 4 leds and a button. The accessories can be seen better in the following images: