


Euler Angles are three angles introduced by Leonhard Euler (1776) to describe the orientation of a rigid body. To describe such an orientation in 3-Dimensional Euclidean Space three angles are required.
Euler Angles provide a way to represent the 3D orientation of an object using a combination of three rotations about different axes.
Body Axes | |
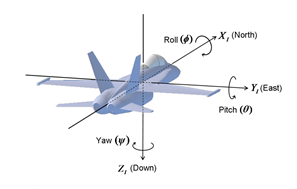 | 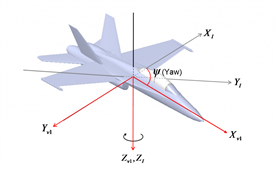 |
| Figure 1 – The Inertial Frame | Figure 2 – Yaw rotation into the Vehicle |
 |  |
Figure 3 – Yaw and Pitch Rotation Applied | Figure 4 – Yaw, Pitch, and Roll applied |
Then we define the Euler angles as:
- α is the angle between the x-axis and the line of nodes.
- β is the angle between the z-axis and the Z-axis.
- γ is the angle between the line of nodes and the X-axis.
So in a flight simulator we have to also deal with the accelerations, along each of the three planes ( pitch, roll, yaw ). They all have an effect on the aircraft. But they are in weird angles. So we have to normalize the aircraft back to normal space as in Figure 1. This is done through a series of matrix rotations. But you can also use Quaternions for the rotation as well. They were first described by Irish mathematician William Rowan Hamilton in 1843
By utilizing quaternions, you can ovoid Gimbal Lock (see below).
Figure 1, at right, relate the various system conversions: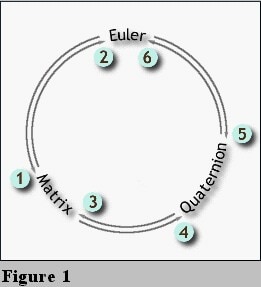
- Euler to Matrix
- Matrix to Euler
- Quaternion to Matrix
- Matrix to Quaternion
- Euler to Quaternion
- Quaternion to Euler
[The information presented here is derived from a diagram by P.M. O'Neill,
September 1981, and from a NASA training manual on quaternions]
To see the complete article please click here.
Gimbal Lock Consider a case of a level sensing platform on an aircraft flying due North with its three gimbal axes mutually perpendicular and angles each zero. If the aircraft pitches up 90 degrees, the aircraft and platform's Yaw axis gimbal becomes parallel to the Roll axis gimbal, and changes about yaw can no longer be compensated for.

 keep tuned in more to come
keep tuned in more to come
Cris ~

