



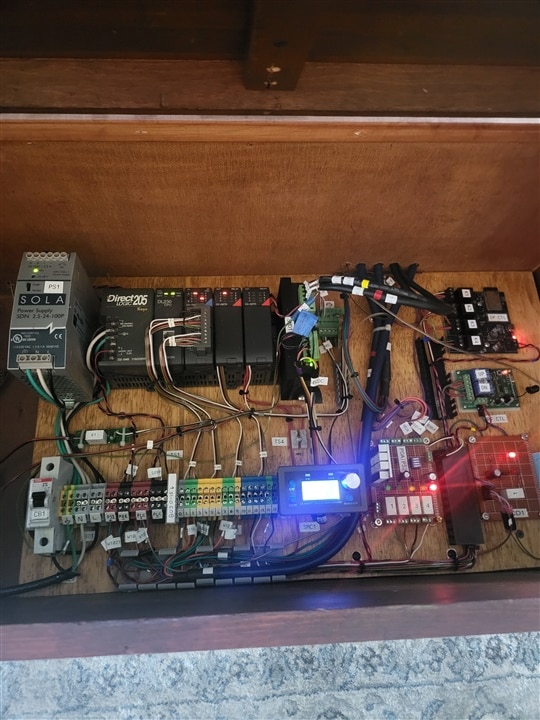
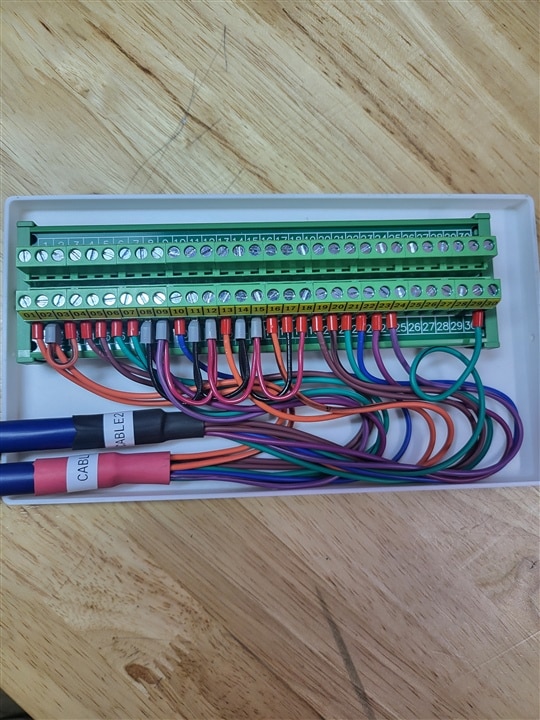
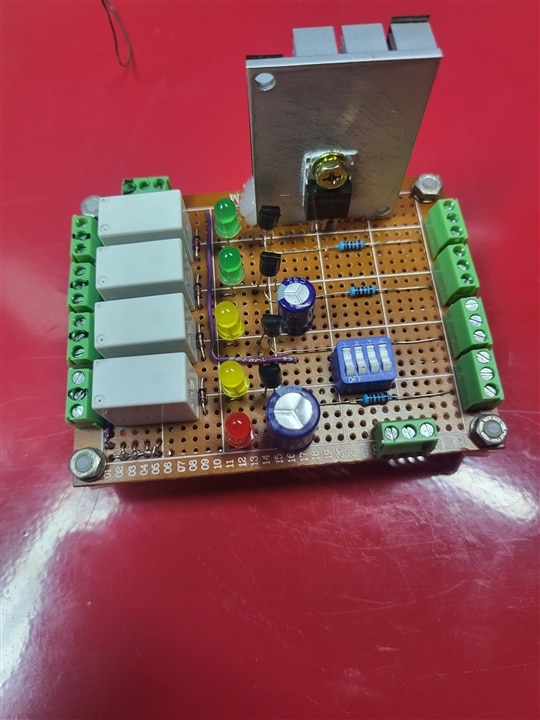
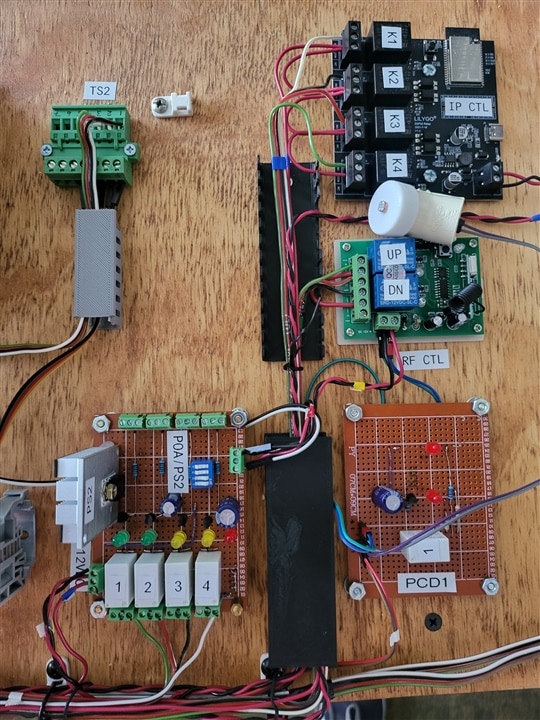
This project is not entirely Arduino, but I think it is a good example of how Arduino's can be incorporated into other systems. The initial design of this project was to automatically open and close the cat door and track the cat's activity also control when the cat can go in or out. The PLC was chosen for the main I/O and stepper motor controls because of its robustness and the Arduino was chosen for the cat counting activity process. The system features three main modes of operation which is 1 - manual up down, 2 - automatic up down, 3 - in only. The up and down operations can be controlled by a pendant station or RF remote and IP website controls. For the stepper motor and linear rail safety for the cat there is a proximity sensor in the cat door to detect anything in the door and stopping operations also the linkage from the linear rail to the door has been designed so if anything closes onto a cat or anything else in the door will not shut. There are four sensors on the door, two low sensors (inside/outside) to detect the cat and two high sensors (inside/outside) to detect humans and prevent the cat door from opening necessarily. The Arduino cat counting is basically for detection if the cat is currently outside or inside by reading even or odd numbers there will be more updates to this system in the future.
I have included all the documentation at the bottom for your reference.








#include <SoftwareSerial.h>
SoftwareSerial SoftSerial (0, 13);
// BCD 1
int a1 = 4; //Bit 0 Decoder 1
int a2 = 5; //Bit 1 Decoder 1
int a3 = 6; //Bit 2 Decoder 1
int a4 = 7; //Bit 3 Decoder 1
// BCD 2
int b1 = 8; //Bit 0 Decoder 2
int b2 = 9; //Bit 1 Decoder 2
int b3 = 10; //Bit 2 Decoder 2
int b4 = 11; //Bit 3 Decoder 2
int n = 0; // Setting initial value of n to 0
int d1;
int d2;
int button = 2;
int state = 0;
int count_value = 0;
int prestate = 0;
int buttonRst = 3;
int buttonState1 = 0; // variable for reading the pushbutton reset status
int SMdataIN = 0; // Serial monitor data input
int SScount;
void setup()
{
Serial.begin(9600);
SoftSerial.begin(9600);
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(7,OUTPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11,OUTPUT);
pinMode(12,OUTPUT);
attachInterrupt(2,button,RISING); // PIR output
attachInterrupt(3,buttonRst,RISING); // Reset button
}
void loop()
{
Serial.print("state"); // Serial.print stuff
Serial.print(" ");
Serial.print(state);
Serial.print(" ");
Serial.print("Count");
Serial.print(" ");
Serial.print(n);
Serial.print(" ");
Serial.print("SS");
Serial.print(" ");
Serial.print(n); // Count
Serial.print(" ");
Serial.print("SM data: "); // SM Recived data
Serial.println(SMdataIN);
//SoftSerial.write(SMdataIN);
{
SoftSerial.write("CNT");
SoftSerial.print(n);
}
if (Serial.available() > 0) // send data only when you receive data:
{
SMdataIN = Serial.read(); // read the incoming byte:
}
state = digitalRead(button); // read the state of the pushbutton value
if(state == HIGH && prestate == 0) // check if the pushbutton is pressed. If it is, then the buttonState is HIGH
{
n++; // Count value
prestate = 1;
}
else if(state == LOW)
{
prestate = 0;
}
if(state == HIGH) // LED on while counting
{
digitalWrite(12, HIGH);
}
if(state == LOW)
{
digitalWrite(12, LOW);
}
if(n == 100) // Reset at 100 to 0
{
n = 0;
}
buttonState1 = digitalRead(buttonRst); // Reset to 0 if button is pressed
if (buttonState1 == HIGH)
{
n = 0;
}
// _____________________________________ BCD conversion and output to pins
d1=n%10; // This will divide n by 10 and the remainder will be stored in d1
d2=n/10; // This will divide n by 10 and the value before decimal will be stored in d2
disp1(d1);
disp2(d2);
delay(100); // 100 ms delay to debounce
}
void disp1(int num) // Display 1
{
if(num == 0) // 0000
{
digitalWrite(a1, LOW); // 0
digitalWrite(a2, LOW); // 0
digitalWrite(a3, LOW); // 0
digitalWrite(a4, LOW); // 0
}
if(num == 1) // 0001
{
digitalWrite(a1, HIGH); // 1
digitalWrite(a2, LOW); // 0
digitalWrite(a3, LOW); // 0
digitalWrite(a4, LOW); // 0
}
if(num == 2) // 0010
{
digitalWrite(a1, LOW); //0
digitalWrite(a2, HIGH); //1
digitalWrite(a3, LOW); //0
digitalWrite(a4, LOW); //0
}
if(num == 3) // 0011
{
digitalWrite(a1, HIGH); //1
digitalWrite(a2, HIGH); //1
digitalWrite(a3, LOW); //0
digitalWrite(a4, LOW); //0
}
if(num == 4) // 0100
{
digitalWrite(a1, LOW); //0
digitalWrite(a2, LOW); //0
digitalWrite(a3, HIGH); //1
digitalWrite(a4, LOW); //0
}
if(num == 5) // 0101
{
digitalWrite(a1, HIGH); //1
digitalWrite(a2, LOW) ; //0
digitalWrite(a3, HIGH); //1
digitalWrite(a4, LOW) ; //0
}
if(num == 6) // 0110
{
digitalWrite(a1, LOW); //0
digitalWrite(a2, HIGH); //1
digitalWrite(a3, HIGH); //1
digitalWrite(a4, LOW) ; //0
}
if(num == 7) // 0111
{
digitalWrite(a1, HIGH); //1
digitalWrite(a2, HIGH); //1
digitalWrite(a3, HIGH); //1
digitalWrite(a4, LOW) ; //0
}
if(num == 8) // 1000
{
digitalWrite(a1, LOW); //0
digitalWrite(a2, LOW); //0
digitalWrite(a3, LOW); //0
digitalWrite(a4, HIGH); //1
}
if(num == 9) // 1001
{
digitalWrite(a1, HIGH); //1
digitalWrite(a2, LOW); //0
digitalWrite(a3, LOW); //0
digitalWrite(a4, HIGH); //1
}
}
void disp2(int num) // Display 2
{
if(num == 0) // 0000
{
digitalWrite(b1, LOW); //0
digitalWrite(b2, LOW); //0
digitalWrite(b3, LOW); //0
digitalWrite(b4, LOW); //0
}
if(num == 1) // 0001
{
digitalWrite(b1, HIGH); //1
digitalWrite(b2, LOW); //0
digitalWrite(b3, LOW); //0
digitalWrite(b4, LOW); //0
}
if(num == 2) // 0010
{
digitalWrite(b1, LOW); //0
digitalWrite(b2, HIGH); //1
digitalWrite(b3, LOW); //0
digitalWrite(b4, LOW); //0
}
if(num == 3) // 0011
{
digitalWrite(b1, HIGH); //1
digitalWrite(b2, HIGH); //1
digitalWrite(b3, LOW); //0
digitalWrite(b4, LOW); //0
}
if(num == 4) // 0100
{
digitalWrite(b1, LOW); //0
digitalWrite(b2, LOW); //0
digitalWrite(b3, HIGH); //1
digitalWrite(b4, LOW); //0
}
if(num == 5) // 0101
{
digitalWrite(b1, HIGH); //1
digitalWrite(b2, LOW) ; //0
digitalWrite(b3, HIGH); //1
digitalWrite(b4, LOW); //0
}
if(num == 6) // 0110
{
digitalWrite(b1, LOW); //0
digitalWrite(b2, HIGH); //1
digitalWrite(b3, HIGH); //1
digitalWrite(b4, LOW); //0
}
if(num == 7) // 0111
{
digitalWrite(b1, HIGH); //1
digitalWrite(b2, HIGH); //1
digitalWrite(b3, HIGH); //1
digitalWrite(b4, LOW); //0
}
if(num == 8) // 1000
{
digitalWrite(b1, LOW); //0
digitalWrite(b2, LOW); //0
digitalWrite(b3, LOW); //0
digitalWrite(b4, HIGH); //1
}
if(num == 9) // 1001
{
digitalWrite(b1, HIGH); //1
digitalWrite(b2, LOW); //0
digitalWrite(b3, LOW); //0
digitalWrite(b4, HIGH); //1
}
}


INPUTS D2-16ND3-2 Slot 0 PLC Card Wire# Ref Function Part Type Connection CA W10100 -24V Comm CA 0 W10101 MPB-1 Run/Stop PENDENT E-Stop SW 12 1 W10102 SS1-2 Mode Auto 1 PENDENT 3 Pos SW 14 2 W10103 SS1-3 Mode Auto 2 PENDENT 3 Pos SW 24 3 W10104 PB1 UP PB-Green PENDENT PB 24 4 W10105 PB2 DN PB-Red PENDENT PB 24 5 W10106 RF/IP UP DASH LILGO/RF REMOTE K1-NO/A1-NO 6 W10107 RF/IP DN DASH LILGO/RF REMOTE K2-NO/A2-NO 7 W10108 LSW1 UP Limit MICRO SW NC CB W10200 -24V Comm CB 0 W10201 LSW2 DN Limit MICRO SW NC 1 W10202 PX1 Cat In Door Taiss M18 Prox BK 2 W10203 POD-1 Cat Inside AM312 PIR K-1-C 3 W10204 POD-2 Cat Outside AM312 PIR K-2-C 4 W10205 POD-3 Human Inside AM312 PIR K-3-C 5 W10206 POD-4 Human Ouside AM312 PIR K-4-C 6 W10207 MRSW-1 Door open MRSW NC 7 W10208 PCD1 Light Level Photo Cell 17 OUTPUTS D2-08TR Slot1 Card Wire# Ref Function Part Type Connection 0 W10301 SMC01 Stop ZK-SMC01_Controller 0 1 W10302 SMC01 REV-UP-CCW ZK-SMC01_Controller 1 2 W10303 SMC01 FOR-DN-CW ZK-SMC01_Controller 2 3 4 5 6 7 C SMC01 COMM ZK-SMC01_Controller BLACK OUTPUTS D2-08TR Slot2 Card Wire# Ref Function Part Type Connection 0 W10505 ENA+ Enable SMD1 Screw 2 1 2 3 4 5 6 7 C ZK-SMC01 DIP Settings RF Remote Control Jumper Settings SW1 On 4.9A PIN 1 PIN 2 PIN 3 SW2 Off 4.9A SW3 Off 4.9A No Jumpers No Jumpers No Jumpers SW4 Off 1/2 Curr SW5 On 800 SW6 Off 800 SW7 On 800 SW8 On 800 PART LIST No Ref MFG Model No Part Type Cost MPB-1 TWTADE hz-11ZS-20X-GR PENDENT E-Stop SW $26.98 SS1 TWTADE hz-11ZS-20X-GR PENDENT 3 Pos SW PB1 TWTADE hz-11ZS-20X-GR PENDENT PB PB2 TWTADE hz-11ZS-20X-GR PENDENT PB RF Unknown Unknown RF REMOTE RF Unknown Unknown RF REMOTE IP DASH LILGO T-Relay ESP32 IP REMOTE IP DASH LILGO T-Relay ESP32 IP REMOTE LSW1 WWZMDiB V-156-1C25 MICRO SW LSW2 WWZMDiB V-156-1C25 MICRO SW PX1 Taiss E3F-DS30P1 Proximity SW MRSW-1 Unknown Unknown MAGNETIC REED SW PHO TB# GUETNEU Terminal Block POD-1 PCE AM312 PIR Ampifler POD-2 PCE AM312 PIR Ampifler POD-3 PCE AM312 PIR Ampifler POD-4 PCE AM312 PIR Ampifler PS Koyo D2-04B PLC Card CPU Koyo D2-230 CPU PLC Card Input Koyo D2-16ND3-2 PLC Card Output Koyo D2-08TR PLC Card ZM-SMC01 Stepper Cotroller DM556 Stepper Motor Driver PS1 Sola SDN 2.5-24-100P 24VDC Power Supply PS2 PCE LM7812c 24V to 12V Power Supply
Top Comments