Hi everybody.
Few days now i started building a small robot (my first one) using an arduino as a controller.
This post is a small presentation of this project
The kit of the robot is from Actobitty and it is a simple 2 motor with an aluminum chassis.
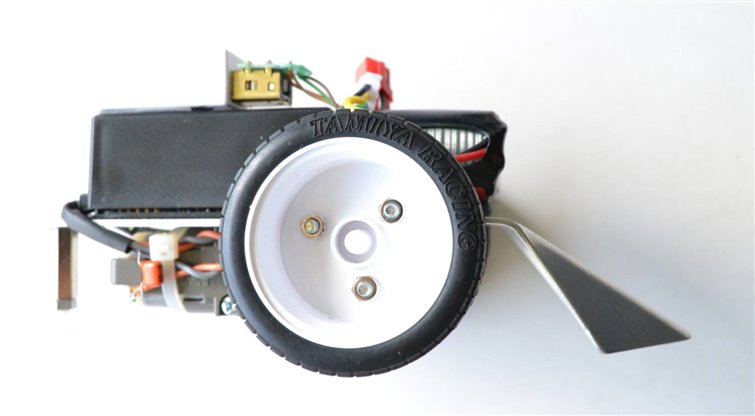
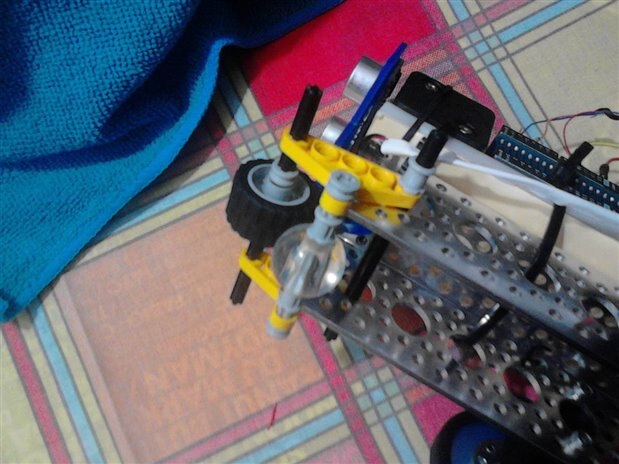
The front "wheel" was a simple plastic one and i noticed that it was difficult to overcame small objects and also difficult in turning. So i took pieces from an old Lego Technic and i made a front fork.
this was the front wheel and these are the holders of the battery below the chassis. I also removed them and manage to transfer the battery up.

this is the Lego fork
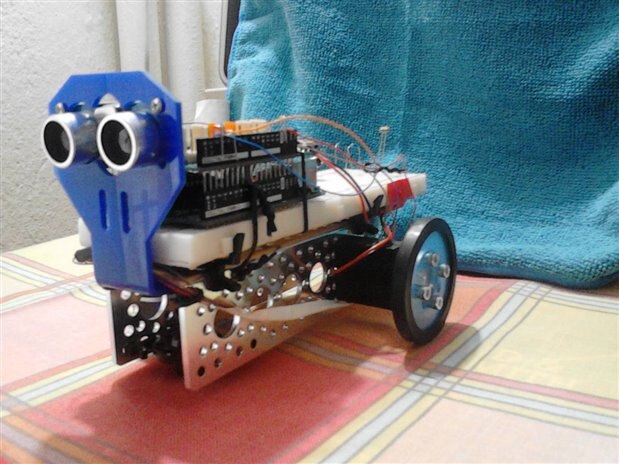
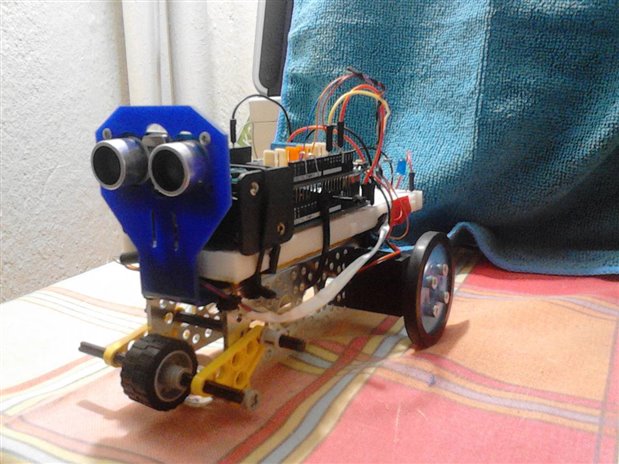
this is how the robot looked when i assembled it.
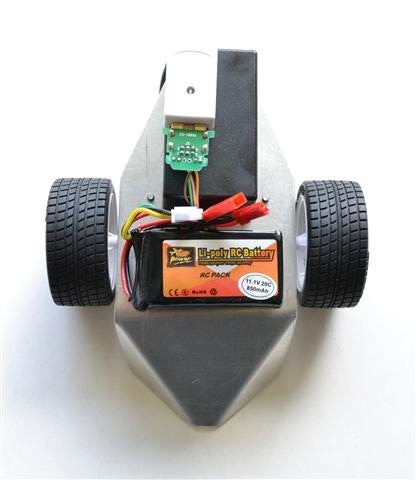
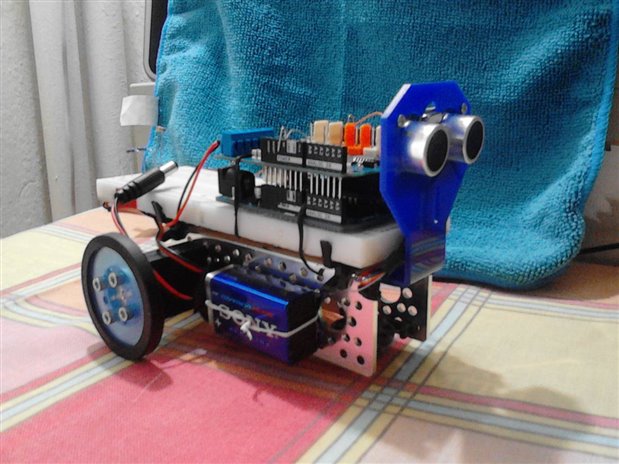
and this is how it looks now.
The original kit includes two holders for your Arduino or Raspberry. I manage to put the breadboard with the holders.
Also the battery pack moved in front of the micro controllers.Now there is a small space at the end of the breadboard for connecting leds etc.
Now the robot uses the following parts:
1.Actobitty 2 wheels robot aluminum chassis
2.2x Micro Gearmotor - 90 RPM
3.Arduino Uno
4.Arduino Motor shield rev.3
5.Ultrasonic sensor HC-SR04 with bracket
6.Breadboard for prototyping and additional sensors.
7.Additional 9V battery.
8.Cell AA Battery Pack with 4 rechargeable batteries
This is a the how u can attach the second battery.
At the present the robot can avoid objects and i found a very good tutorial here James Robot Tutorial - Duino-Robotics .
The code from the tutorial is for a robot with a servo ultrasonic sensor and servo motors. I use an Arduino motor shield so i had to make modifications.
In the next days ill try to load a video with the robot in action.
*the attachment code is working for me but still needs improvement