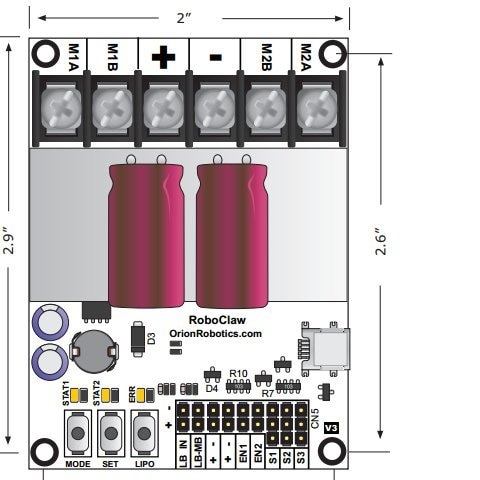
analogue into an arduino a-star controlling a robo claw controller in encoder mode hooked up exactly like in page 48 in the orion manual
Attachments:
| roboclaw_user_manual.pdf |
analogue into an arduino a-star controlling a robo claw controller in encoder mode hooked up exactly like in page 48 in the orion manual
| roboclaw_user_manual.pdf |