Why does the LED flash twice with one push and release of the button?
#include <Servo.h>
Servo Stop_servo; // create servo object to control a servo
// Buttons with Pull-Ups are "backwards"
// Some DEFINEs to make reading code easier
#define PUSHED false
#define NOT_PUSHED true
#define WATCH_BUTTON true
#define IGNORE_BUTTON false
// Time to wait for bounce, in MICROsconds
const int buttonWaitInterval = 6000;
// Pins for LED and Button
const int LEDpin = 5;
const int BUTTONpin = 2;
float Minpos = 0; // variable to store the servo position
float Maxpos = 255; //greatest travel of servo
// Used to track how long between "bounces"
unsigned long previousMicros = 0;
// Used to track state of button (high or low)
boolean previousButtonState = NOT_PUSHED;
// Variable reporting de-bounced state.
boolean debouncedButtonState = NOT_PUSHED;
// Tracks if we are waiting for a "bounce" event
boolean bounceState = false;
// Nothing surprising here
void setup() {
pinMode(LEDpin, OUTPUT);
pinMode(BUTTONpin, INPUT_PULLUP);
digitalWrite(LEDpin, LOW);
Stop_servo.attach(3); // attaches the servo on pin 3 to the servo object
Stop_servo.write(0);
Serial.begin(9600);
Serial.println(F("Serial Initialized"));
}
void loop() {
// This needs to be called periodically to
// update the timers and button status
updateButton();
// This replaces: digitalRead(BUTTONpin);
//digitalWrite(LEDpin, debouncedButtonState);
if (debouncedButtonState == LOW) {
digitalWrite(LEDpin, HIGH);
delay(500);
digitalWrite(LEDpin, LOW);
delay(500);
Stop_servo.write(255);
delay(5000);
Stop_servo.write(0);
Serial.println(F("servo cycled"));
}
}
// All of the magic happens here
void updateButton() {
// We are waiting for any activity on the button
if (bounceState == WATCH_BUTTON) {
// Get and store current button state
boolean currentButtonState = digitalRead(BUTTONpin);
// Check to see if a transition has occured (and only one)
if (previousButtonState != currentButtonState) {
// A transition was detected, ignore the others for a while
bounceState = IGNORE_BUTTON;
// Store current time (start the clock)
previousMicros = micros();
}
// Keep storing existing button state, if we're watching
previousButtonState = currentButtonState;
}
// We are waiting for the buttonWaitInterval to elapse
if (bounceState == IGNORE_BUTTON) {
// Compare current value of micros to previously stored, enough time yet?
unsigned long currentMicros = micros();
if ((unsigned long)(currentMicros - previousMicros) >= buttonWaitInterval) {
// Store the state of the button/pin to debouncedButtonState, which "reports"
// the correct value. This allows for the code to handle active high or low inputs
debouncedButtonState = digitalRead(BUTTONpin);
// Go back to watching the button again.
bounceState = WATCH_BUTTON;
}
}
}
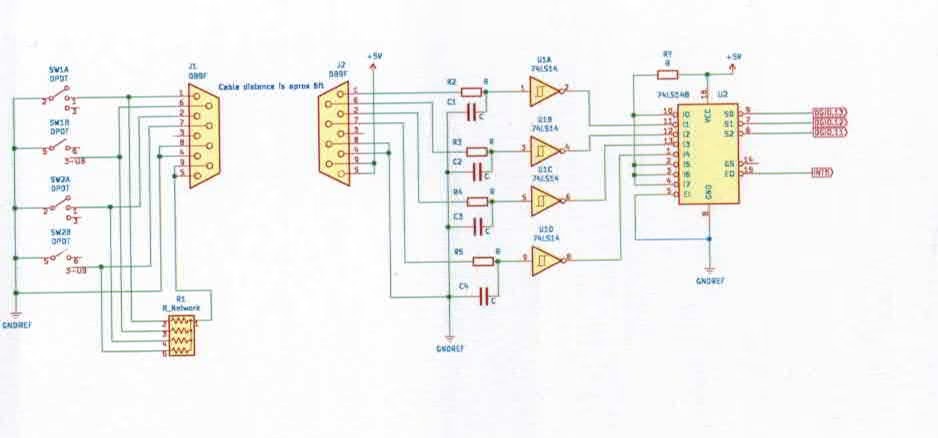
I'm trying to use Baldengineer debounce code to read a button and take an action. Each press of the button causes the LED to flash twice. The serial output reflects the routine running twice.
I have failed in my code changes to get the result I hope. I have looked at Internet and have found no hints to help.